Crédit :Université de technologie du Queensland
Les roboticiens de QUT ont développé un moyen plus rapide et plus précis pour les robots de saisir des objets, y compris dans des environnements encombrés et changeants, qui a le potentiel d'améliorer leur utilité dans les environnements industriels et domestiques.
Le Dr Jürgen Leitner de QUT a déclaré que saisir et ramasser un objet était une tâche de base pour les humains, cela s'était avéré incroyablement difficile pour les machines.
"Nous avons pu programmer des robots, dans des environnements très contrôlés, pour ramasser des objets très spécifiques. Cependant, l'une des principales lacunes des systèmes de préhension robotiques actuels est l'incapacité de s'adapter rapidement au changement, comme lorsqu'un objet est déplacé, " a déclaré le Dr Leitner.
"Le monde n'est pas prévisible - les choses changent et bougent et se mélangent et, souvent, cela se produit sans avertissement - les robots doivent donc être capables de s'adapter et de travailler dans des environnements très peu structurés si nous voulons qu'ils soient efficaces, " il a dit.
La nouvelle méthode, développé par Ph.D. chercheur Douglas Morrison, Dr. Leitner et professeur distingué Peter Corke de la faculté des sciences et d'ingénierie de QUT, est un temps réel, méthode de synthèse de saisie indépendante de l'objet pour la saisie en boucle fermée.
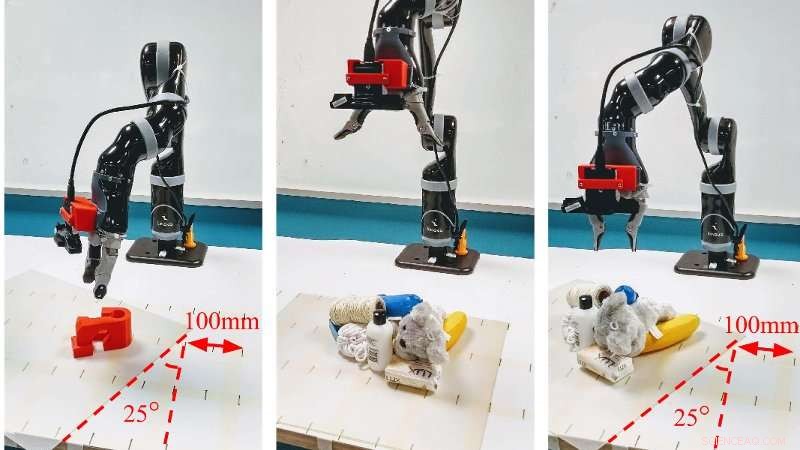
"L'approche Generative Grasping Convolutional Neural Network fonctionne en prédisant la qualité et la pose d'une saisie à deux doigts à chaque pixel. En cartographiant ce qui se trouve devant lui à l'aide d'une image de profondeur en un seul passage, le robot n'a pas besoin d'échantillonner de nombreuses saisies possibles avant de prendre une décision, éviter de longs temps de calcul, ", a déclaré M. Morrison.
"Dans nos tests en conditions réelles, nous avons atteint un taux de réussite de saisie de 83 % sur un ensemble d'objets inédits à géométrie antagoniste et de 88 % sur un ensemble d'objets ménagers déplacés lors de la tentative de saisie. Nous obtenons également une précision de 81 % lors de la saisie dans un fouillis dynamique."
Le Dr Leitner a déclaré que l'approche a surmonté un certain nombre de limitations des techniques actuelles de saisie en profondeur.
"Par exemple, au Amazon Picking Challenge, que notre équipe a remporté en 2017, notre robot CartMan regarderait dans une poubelle d'objets, prendre une décision sur le meilleur endroit pour saisir un objet, puis entrer aveuglément pour essayer de le ramasser, " il a dit
« Grâce à cette nouvelle méthode, nous pouvons traiter des images des objets qu'un robot visualise en 20 millisecondes environ, ce qui permet au robot de mettre à jour sa décision sur l'endroit où saisir un objet, puis de le faire avec un objectif beaucoup plus important. Ceci est particulièrement important dans les espaces encombrés, " il a dit.

Crédit :Université de technologie du Queensland
Le Dr Leitner a déclaré que les améliorations seraient précieuses pour l'automatisation industrielle et dans les environnements domestiques.
"Cet axe de recherche nous permet d'utiliser des systèmes robotiques non seulement dans des environnements structurés où toute l'usine est construite sur la base de capacités robotiques. Il nous permet également de saisir des objets dans des environnements non structurés, où les choses ne sont pas parfaitement planifiées et ordonnées, et les robots doivent s'adapter au changement.
« Cela présente des avantages pour l'industrie :des entrepôts pour les achats et le tri en ligne, jusqu'à la cueillette des fruits. Il peut également être appliqué à la maison, à mesure que des robots plus intelligents sont développés pour non seulement aspirer ou nettoyer un sol, mais aussi pour ramasser des objets et les ranger."
Le document de l'équipe Closing the Loop for Robotic Grasping:A Real-time, L'approche de synthèse de saisie générative sera présentée cette semaine à Robotics:Science and Systems, la conférence internationale de robotique la plus sélective, qui se tient à l'Université Carnegie Mellon de Pittsburgh aux États-Unis.