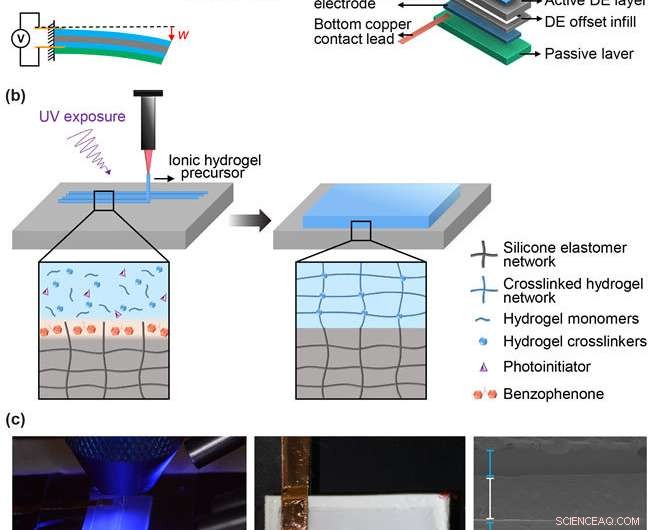
(a) Schéma d'un dispositif d'actionneur souple (à gauche) et vue éclatée du dispositif et des couches de matériau constitutif (à droite). (b) Schéma de dépôt d'hydrogel (impression 3D) sur la surface d'une couche de silicone après traitement de surface et sous exposition à la lumière UV. (c) Impression de l'hydrogel ionique sur la couche passive après traitement de surface (gauche), DEA imprimé en 3D final (au milieu), et image de la microstructure de la section transversale de l'appareil (à droite). Crédit :armée américaine
Pour surmonter les limitations de rigidité et d'actionnement des matériaux dans les systèmes robotiques actuels, un projet de recherche conjoint du laboratoire de recherche de l'armée américaine et de l'université du Minnesota s'est inspiré des invertébrés.
L'armée américaine utilise des robots qui sont structurellement rigides, les rendant peu pratiques lors de la réalisation d'opérations militaires dans des environnements urbains très encombrés et contestés, où les manœuvres secrètes sont essentielles pour acquérir la supériorité militaire.
"Une manœuvre furtive réussie nécessite une flexibilité structurelle élevée et un contrôle distributif pour se faufiler dans des espaces confinés ou restreints, fonctionner pendant de longues périodes et imiter les morphologies biologiques et l'adaptabilité, " a déclaré le Dr Ed Habtour, Chercheur ARL spécialisé en dynamique structurelle non linéaire.
Selon Habtour, Les robots militaires actuels ont deux limitations majeures qui les empêchent d'imiter la locomotion d'organismes biologiques.
D'abord, ces robots n'ont pas la flexibilité dynamique nécessaire, car ils sont pour la plupart assemblés avec des composants mécaniques et électroniques rigides.
Seconde, les robots rigides nécessitent des mécanismes et des circuits électriques complexes pour obtenir un actionnement actif et des modes de mouvement complexes.
Pour surmonter ces limites, un projet de recherche conjoint de l'ARL et de l'UMN s'est inspiré des invertébrés.
Cet effort de recherche a conduit à la création de prototypes d'actionneurs souples utilisant des matériaux actifs avec des paramètres remarquablement ajustables, comme la flexibilité structurelle, morphologie et actionnement dynamique.
Le prototype est le premier actionneur en élastomère diélectrique entièrement imprimé en 3D, ou DEA, qui peut effectuer un mouvement de flexion élevé.
Les DEA imprimés en 3D présentaient des déflexions significativement plus importantes, trois fois plus que d'autres exemples récents dans la littérature scientifique.
Ces résultats ont été publiés dans Lettres de mécanique extrême (EML) dans un article intitulé :« actionneurs souples à entraînement électrique imprimés en 3D », 2018.
« Dans la phase initiale du projet, notre équipe a commencé par étudier de nouvelles méthodes pour émuler la locomotion des invertébrés, qui a fourni des informations fondamentales sur les machines de leurs circuits d'actionnement distribués doux qui permettent des mouvements de flexion élevés sans support squelettique, " a déclaré le professeur Michael McAlpine de l'UMN.

Le Dr Ed Habtour travaille à la Direction de la technologie des véhicules du Laboratoire de recherche de l'armée américaine, où il se spécialise dans les systèmes dynamiques non linéaires. Crédit :photo de l'armée américaine par Conrad Johnson
La compréhension des mécanismes innés de l'actionnement distributif observé dans la nature a aidé l'équipe à identifier les paramètres importants qui peuvent être manipulés pour accomplir de nouvelles fonctions, tels que la réalisation de modes de mouvement très flexibles.
Selon McAlpine, pour mieux comprendre l'importance de ces paramètres, il a fallu dans un premier temps construire et tester un prototype similaire aux actionneurs trouvés dans la nature via une plateforme d'impression 3D sur mesure, et développer ensuite un modèle mathématique unifié pour étudier la sensibilité de chaque paramètre et prédire les différents mécanismes d'actionnement optimaux.
Circuits d'actionnement distribués imprimés en 3D UMN impliquant des matériaux extensibles avec des propriétés mécaniques similaires à celles des organismes biologiques tels que les céphalopodes et les vers.
ARL a créé un modèle généralisé en utilisant une approche de formulation énergétique, ce qui était essentiel pour identifier deux mécanismes importants pour permettre un mouvement de flexion élevé dans les actionneurs biologiques mous :(i) régler les propriétés physiques (mécaniques et géométriques) en exploitant l'interaction entre les matériaux et les non-linéarités dynamiques pour augmenter le mouvement ; et (ii) mettre en évidence le couplage électromécanique entre le champ électrique et la rigidité structurelle non linéaire à travers les circuits d'actionnement distributif.
"Les résultats de la recherche représentent un tremplin important vers la fourniture au Solider d'une plate-forme de fabrication autonome de forme libre - une imprimante 3D de nouvelle génération, qui peut imprimer des matériaux et des dispositifs fonctionnels - pour générer des actionneurs souples et des robots souples potentiellement sans fil à la demande, à la volée et au besoin, ", a déclaré Habtour.
Habtour a noté que la recherche suggère également que les actionneurs souples peuvent être des candidats de choix pour la fabrication additive autonome sur le champ de bataille.
"Contrairement aux DEA imprimés en 3D actuels, le nouveau procédé de fabrication ne nécessite pas d'étapes de post-traitement, comme l'assemblage, séchage ou recuit, " a déclaré l'auteur principal Ghazaleh Haghiashtiani. " Avec la nouvelle méthode d'impression 3D, le Solider peut tirer parti des propriétés d'actionnement uniques des DEA souples au niveau des matériaux fondamentaux avec une résolution et une complexité à l'échelle microscopique, avec un minimum d'expertise préalable."
Quant aux prochaines étapes, Habtour a déclaré que l'intention est de développer les principes expérimentaux et théoriques qui régissent l'interaction entre les interfaces internes et la cinétique des interactions dans les systèmes variant dans le temps observés dans les organismes biologiques, qui assurent leur souplesse de locomotion et leur résilience.
"Les interactions intrigantes entre les propriétés micromécaniques des matériaux et diverses non-linéarités peuvent offrir de nouvelles opportunités scientifiques pour émuler les interactions symbiotiques dans les systèmes biologiques, " dit Habtour. " Si nous pouvons comprendre ces interactions, Ensuite, nous pouvons utiliser ces informations pour fabriquer des structures dynamiques et des robots flexibles conçus pour être conscients d'eux-mêmes, autodétectables et capables d'ajuster leurs morphologies et leurs propriétés en temps réel pour s'adapter à une myriade de conditions externes et internes."
Avec ça, Habtour a déclaré que les implications seront de découvrir les dynamiques émergentes des structures vivantes et de les imiter, fabriquer de manière autonome des structures et des dispositifs fonctionnellement complexes, et l'exploitation de nouveaux modes d'actionnement non réalisables dans les systèmes robotiques et mécaniques conventionnels.