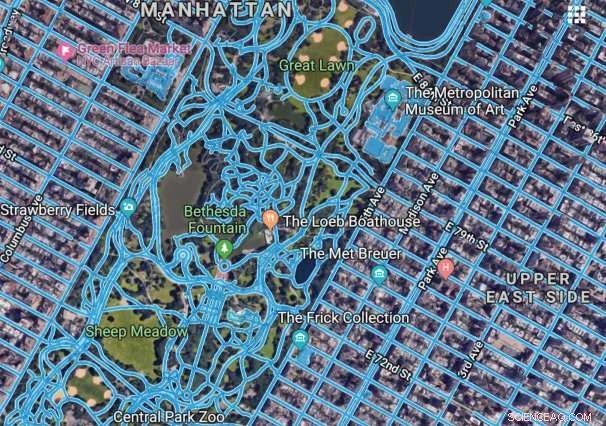
Pour créer des cartes routières complètes, les entreprises comme Google doivent souvent demander à leurs employés de prendre des images aériennes existantes avec des informations incomplètes et de combler manuellement les lacunes. Crédit :Massachusetts Institute of Technology
Les applications cartographiques ont peut-être changé notre monde, mais ils n'ont pas encore tout cartographié. Spécifiquement, cartographier les routes peut être difficile et fastidieux :même après avoir pris des images aériennes, les entreprises doivent encore passer de nombreuses heures à tracer manuellement les routes. Par conséquent, même des entreprises comme Google n'ont pas encore réussi à cartographier la grande majorité des plus de 20 millions de kilomètres de routes à travers le monde.
Les lacunes dans les cartes sont un problème, en particulier pour les systèmes en cours de développement pour les voitures autonomes. Pour résoudre le problème, des chercheurs du Laboratoire d'informatique et d'intelligence artificielle (CSAIL) du MIT ont créé RoadTracer, une méthode automatisée pour créer des feuilles de route 45 % plus précises que les approches existantes.
En utilisant les données d'images aériennes, l'équipe dit que RoadTracer n'est pas seulement plus précis, mais plus rentables que les approches actuelles. Le professeur du MIT, Mohammad Alizadeh, affirme que ce travail sera utile à la fois pour les géants de la technologie comme Google et pour les petites organisations sans les ressources nécessaires pour organiser et corriger de grandes quantités d'erreurs dans les cartes.
"RoadTracer est bien adapté pour cartographier les régions du monde où les cartes sont souvent obsolètes, qui comprend à la fois des endroits moins peuplés et des zones où il y a de fréquentes constructions, " dit Alizadeh, l'un des co-auteurs d'un nouvel article sur le système. "Par exemple, les cartes existantes pour les zones reculées comme la Thaïlande rurale manquent de nombreuses routes. RoadTracer pourrait aider à les rendre plus précis."
Par exemple, en regardant des images aériennes de la ville de New York, RoadTracer a pu cartographier correctement 44 % de ses carrefours routiers, ce qui est plus de deux fois plus efficace que les approches traditionnelles basées sur la segmentation d'images qui ne pourraient cartographier que 19%.
Le papier, qui sera présenté en juin à la Conférence sur la vision par ordinateur et la reconnaissance de formes (CVPR) à Salt Lake City, Utah, est une collaboration entre CSAIL et le Qatar Computing Research Institute (QCRI).
Les co-auteurs d'Alizadeh au MIT comprennent les étudiants diplômés Fayven Bastani et Songtao He, et les professeurs Hari Balakrishnan, Sam Madden, et David DeWitt. Les co-auteurs du QCRI incluent l'ingénieur logiciel senior Sofiane Abbar et Sanjay Chawla, qui est le directeur de recherche du groupe d'analyse de données de QCRI.
Les efforts actuels pour automatiser les cartes impliquent d'entraîner des réseaux de neurones à regarder des images aériennes et à identifier des pixels individuels comme « routier » ou « non routier ». Parce que les images aériennes peuvent souvent être ambiguës et incomplètes, de tels systèmes nécessitent également une étape de post-traitement qui vise à essayer de combler certaines des lacunes.
Malheureusement, ces approches dites de « segmentation » sont souvent imprécises :si le modèle étiquette mal un pixel, cette erreur sera amplifiée dans la feuille de route finale. Des erreurs sont particulièrement probables si les images aériennes comportent des arbres, immeubles, ou des ombres qui obscurcissent le début et la fin des routes. (L'étape de post-traitement nécessite également de prendre des décisions basées sur des hypothèses qui ne tiennent pas toujours, comme connecter deux segments de route simplement parce qu'ils sont côte à côte.)
Pendant ce temps, RoadTracer crée des cartes étape par étape. Il démarre à un endroit connu du réseau routier, et utilise un réseau de neurones pour examiner la zone environnante afin de déterminer quel point est le plus susceptible d'être la prochaine partie de la route. Il ajoute ensuite ce point et répète le processus pour tracer progressivement le réseau routier une étape à la fois.
"Plutôt que de prendre des milliers de décisions différentes à la fois pour savoir si différents pixels représentent des parties d'une route, RoadTracer se concentre sur le problème plus simple de déterminer la direction à suivre en partant d'un endroit particulier que nous savons être une route, " dit Bastani. " À bien des égards, cela est en fait beaucoup plus proche de la façon dont nous, humains, construisons des modèles mentaux du monde qui nous entoure. "
L'équipe a formé RoadTracer sur des images aériennes de 25 villes dans six pays d'Amérique du Nord et d'Europe, puis a évalué ses capacités de cartographie sur 15 autres villes.
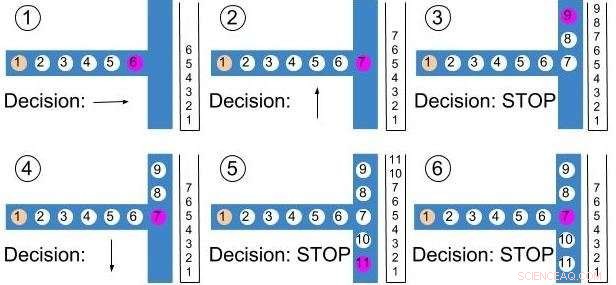
Pour créer une feuille de route, le système démarre à un endroit connu et utilise un réseau de neurones pour examiner la zone environnante afin de déterminer quel point est le plus susceptible d'être la prochaine partie de la route. Il ajoute ensuite ce point et répète le processus pour tracer progressivement la route une étape à la fois. Crédit :Massachusetts Institute of Technology
"Il est important qu'un système de cartographie soit capable de bien fonctionner sur les villes sur lesquelles il ne s'est pas entraîné, parce que les régions où la cartographie automatique est la plus prometteuse sont celles où les cartes existantes sont inexistantes ou inexactes, " dit Balakrishnan.
Bastani dit que le fait que RoadTracer ait un taux d'erreur inférieur de 45% est essentiel pour rendre les systèmes de cartographie automatique plus pratiques pour des entreprises comme Google.
"Si le taux d'erreur est trop élevé, il est alors plus efficace de cartographier les routes manuellement à partir de zéro plutôt que de supprimer les segments incorrects de la carte déduite, " dit Bastani.
Toujours, mettre en œuvre quelque chose comme RoadTracer ne sortirait pas complètement les gens de la boucle :l'équipe dit qu'elle pourrait imaginer le système proposant des cartes routières pour une grande région, puis faire venir un expert humain pour vérifier la conception.
"Cela dit, ce qui est clair, c'est qu'avec un système comme le nôtre, vous pourriez réduire considérablement la quantité de travail fastidieux que les humains auraient à faire, " dit Alizadeh.
En effet, l'un des avantages de l'approche incrémentielle de RoadTracer est qu'elle facilite grandement la correction des erreurs; les superviseurs humains peuvent simplement les corriger et relancer l'algorithme là où ils s'étaient arrêtés, plutôt que de continuer à utiliser des informations imprécises qui se répercutent sur d'autres parties de la carte.
Bien sûr, les images aériennes ne sont qu'une pièce du puzzle. Ils ne vous donnent pas d'informations sur les routes qui ont des passages supérieurs et inférieurs, car ceux-ci sont impossibles à déterminer d'en haut. Par conséquent, l'équipe développe également séparément des algorithmes qui peuvent créer des cartes à partir de données GPS, et travailler à fusionner ces approches en un seul système de cartographie.
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.