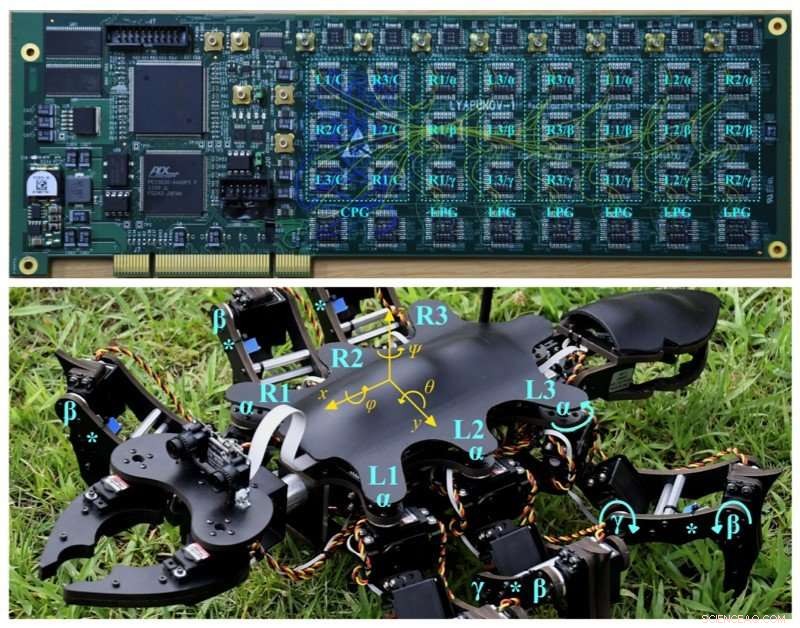
Vues du circuit imprimé mettant en œuvre le contrôleur et du robot. (Reproduit avec la permission de l'article publié). Crédit :IEEE ACCESS
Une étude menée par des chercheurs de l'Institut de technologie de Tokyo (Tokyo Tech) a découvert de nouvelles façons de conduire des robots à plusieurs pattes au moyen d'un contrôleur à deux niveaux. Le contrôleur proposé utilise un réseau d'oscillateurs dits non linéaires qui permet de générer diverses allures et postures, qui ne sont spécifiés que par quelques paramètres de haut niveau. L'étude inspire de nouvelles recherches sur la façon dont les robots à plusieurs pattes peuvent être contrôlés, y compris à l'avenir en utilisant des interfaces cerveau-ordinateur.
Dans le monde naturel, de nombreuses espèces peuvent marcher sur des pentes et des surfaces irrégulières, atteindre des endroits inaccessibles même aux robots rover les plus avancés. Cela reste un mystère à quel point les mouvements complexes sont gérés de manière si transparente, même par les plus petites créatures.
Ce que nous savons, c'est que même les cerveaux les plus simples contiennent des circuits générateurs de motifs (CPG), qui sont câblés spécifiquement pour générer des modèles de marche. Les tentatives pour reproduire artificiellement de tels circuits ont eu jusqu'à présent un succès limité, en raison d'une faible flexibilité.
Maintenant, des chercheurs au Japon et en Italie proposent une nouvelle approche pour la génération de modèles de marche, basé sur un réseau hiérarchique d'oscillateurs électroniques disposés sur deux niveaux, qu'ils ont démontré à l'aide d'un robot hexapode semblable à une fourmi. La réalisation ouvre de nouvelles voies pour le contrôle des robots à pattes. Publié dans Accès IEEE , la recherche est le résultat d'une collaboration entre des scientifiques de Tokyo Tech, en partie financé par la World Research Hub Initiative, l'Académie polonaise des sciences de Cracovie, Pologne, et l'Université de Catane, Italie.
Le contrôleur d'inspiration biologique se compose de deux niveaux. Au sommet, il contient un CPG, responsable du contrôle de la séquence globale des mouvements des jambes, connu sous le nom de démarche. Au fond, il contient six générateurs de motifs locaux (GPL), responsable du contrôle des trajectoires des jambes individuelles.
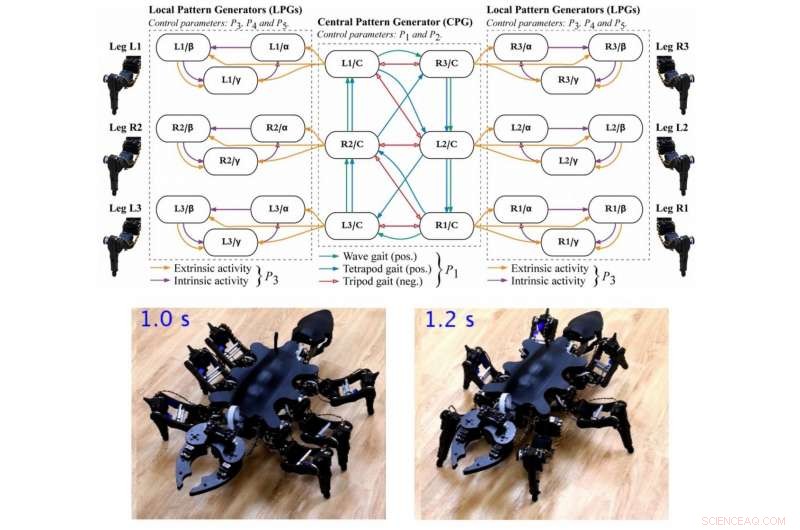
En haut :Architecture du contrôleur, montrant le générateur de motif central, qui contrôle le schéma de marche global, et des deux côtés, les six générateurs de motifs locaux, qui contrôlent les trajectoires individuelles des jambes. En bas :Images fixes représentatives du robot marchant dans une posture de fourmi (à gauche) et une posture de cafard (à droite). Crédit :IEEE ACCESS
L'auteur principal de l'étude, Ludovico Minati, qui est également affilié à l'Académie polonaise des sciences de Cracovie, Pologne et invité à l'Institute of Innovative Research (IIR) de Tokyo Tech dans le cadre de la World Research Hub Initiative explique que les insectes peuvent adapter rapidement leur démarche en fonction d'un large éventail de facteurs, mais surtout leur vitesse de marche. Certaines allures sont observées fréquemment et sont considérées comme canoniques, mais en réalité, un nombre quasi infini d'allures sont disponibles, et différents insectes tels que les fourmis et les cafards réalisent des démarches similaires dans des postures très différentes.
Des difficultés ont été rencontrées en essayant de condenser autant de complexité dans des générateurs de motifs artificiels. Le contrôleur proposé montre un niveau de polyvalence extrêmement élevé grâce à une mise en œuvre basée sur des réseaux analogiques programmables sur le terrain (FPAA), qui permettent la reconfiguration et le réglage à la volée de tous les paramètres du circuit. Il s'appuie sur des années de recherche antérieure sur les réseaux électroniques non linéaires et chaotiques, qui a démontré leur capacité à reproduire les phénomènes observés dans les cerveaux biologiques, même lorsqu'il est câblé dans des configurations très simples.
"Peut-être que le moment le plus excitant de la recherche a été lorsque nous avons observé le robot présenter des phénomènes et des démarches que nous n'avions ni conçus ni prévus, et découvert plus tard existent également dans les insectes biologiques, " dit Minati. De tels phénomènes émergents surviennent d'autant plus que le réseau est réalisé avec des composants analogiques et permet un certain degré d'auto-organisation, représentant une approche très différente de l'ingénierie conventionnelle, où tout est conçu a priori et fixé. « Cela nous rapproche beaucoup plus du fonctionnement de la biologie, " il ajoute.
Yasuharu Koike, également basé à l'IIF, commente :"Un aspect important du contrôleur est qu'il condense tant de complexité en un petit nombre de paramètres. Ceux-ci peuvent être considérés comme des paramètres de haut niveau, en ce qu'ils fixent explicitement l'allure, la vitesse, posture, etc. Parce qu'ils peuvent être modifiés dynamiquement, à l'avenir, il devrait être facile de les faire varier en temps réel à l'aide d'une interface cerveau-ordinateur, permettant le contrôle de cinématiques complexes autrement impossibles à dominer avec les approches actuelles."
Et Natsue Yoshimura, également basé à l'IIF, dit : « , nous pensons qu'il peut être plus fluide à conduire par rapport aux systèmes qui décodent des commandes discrètes. Cela peut avoir des implications pratiques, et notre laboratoire possède un savoir-faire important dans ce domaine."