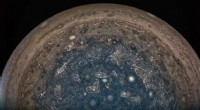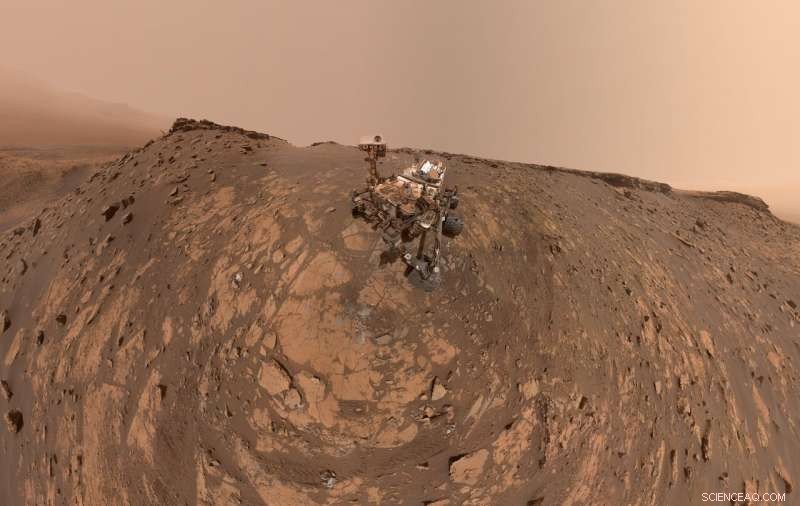
Ce selfie a été pris par le rover Curiosity Mars de la NASA le 26 février 2020 (le 2, 687e jour martien, ou sol, de la mission). La couche de roche en ruine en haut de l'image est "le fronton de Greenheugh, " que Curiosity a gravi peu de temps après avoir pris l'image. Crédit :NASA/JPL-Caltech/MSSS
Le rover Curiosity Mars de la NASA a récemment établi un record pour le terrain le plus escarpé qu'il ait jamais escaladé, au sommet du "fronton de Greenheugh, " une large plaque de roche qui se trouve au sommet d'une colline. Et avant de faire cela, le rover a pris un selfie, capturer la scène juste en dessous de Greenheugh.
Devant le rover se trouve un trou qu'il a foré lors de l'échantillonnage d'une cible de substrat rocheux appelée "Hutton". Le selfie entier est un panorama à 360 degrés assemblé à partir de 86 images relayées sur Terre. Le selfie capture le rover à environ 3,4 mètres sous le point où il a grimpé sur le fronton en ruine.
La curiosité a finalement atteint le sommet de la pente le 6 mars (le 2, 696e jour martien, ou sol, de la mission). Il a fallu trois trajets pour escalader la colline, le second a incliné le rover de 31 degrés - le plus que le rover ait jamais incliné sur Mars et juste en deçà du record d'inclinaison de 32 degrés du rover Opportunity désormais inactif, situé en 2016. Curiosity a pris le selfie le 26 février, 2020 (sol 2687).
Depuis 2014, Curiosity a parcouru le mont Sharp, une montagne de 5 kilomètres de haut au centre du cratère Gale. Les opérateurs de rover du Jet Propulsion Laboratory de la NASA en Californie du Sud planifient soigneusement chaque trajet pour s'assurer que Curiosity sera en sécurité. Le rover ne risque jamais de s'incliner au point de se renverser - le système de roues à bogie oscillant de Curiosity lui permet de s'incliner jusqu'à 45 degrés en toute sécurité - mais les entraînements raides font tourner les roues sur place.
Comment les selfies sont-ils pris ?
Avant la montée, Curiosity a utilisé les caméras de navigation en noir et blanc situées sur son mât pour, pour la première fois, enregistrer un court métrage de son "selfie stick, " autrement connu comme son bras robotique.
La mission de Curiosity est d'étudier si l'environnement martien aurait pu soutenir la vie microbienne il y a des milliards d'années. Un outil pour le faire est la caméra Mars Hand Lens, ou MAHLI, situé dans la tourelle à l'extrémité du bras robotique. Cette caméra offre une vue rapprochée des grains de sable et des textures rocheuses, de la même manière qu'un géologue utilise une loupe à main pour regarder de plus près sur le terrain sur Terre.
En faisant pivoter la tourelle pour faire face au rover, l'équipe peut utiliser MAHLI pour montrer la curiosité. Parce que chaque image MAHLI ne couvre qu'une petite zone, il nécessite de nombreuses images et positions de bras pour capturer pleinement le rover et ses environs.
"On nous demande si souvent comment Curiosity prend un selfie, " a déclaré Doug Ellison, un cameraman Curiosity au JPL. "Nous avons pensé que la meilleure façon de l'expliquer serait de laisser le rover montrer à tout le monde de son propre point de vue comment c'est fait."