Ce résultat de recherche montre que les humains peuvent intuitivement apprendre aux robots à être flexibles, car il n'a pas été accompli par le calcul numérique ou la programmation des mouvements du robot. Crédit : Institut coréen des sciences et de la technologie (KIST)
L'équipe du Dr Kee-hoon Kim du Center for Intelligent &Interactive Robotics de l'Institut coréen des sciences et technologies (KIST) a développé une méthode d'enseignement des "robots à impédance contrôlée" par le biais de démonstrations humaines utilisant des électromyogrammes de surface (sEMG) des muscles, et a réussi à apprendre à un robot à piéger une balle tombée comme un joueur de football. Un électromyogramme de surface est un signal électrique produit lors de l'activation musculaire qui peut être capté à la surface de la peau.
Les robots récemment développés à contrôle d'impédance ont ouvert une nouvelle ère de robotique basée sur l'élasticité naturelle des muscles et des articulations humains, ce qui manque aux robots rigides conventionnels. Les robots dotés d'articulations flexibles devraient pouvoir fonctionner, sauter des haies et faire du sport comme les humains. Cependant, la technologie requise pour apprendre à de tels robots à se déplacer de cette manière n'était pas disponible jusqu'à récemment.
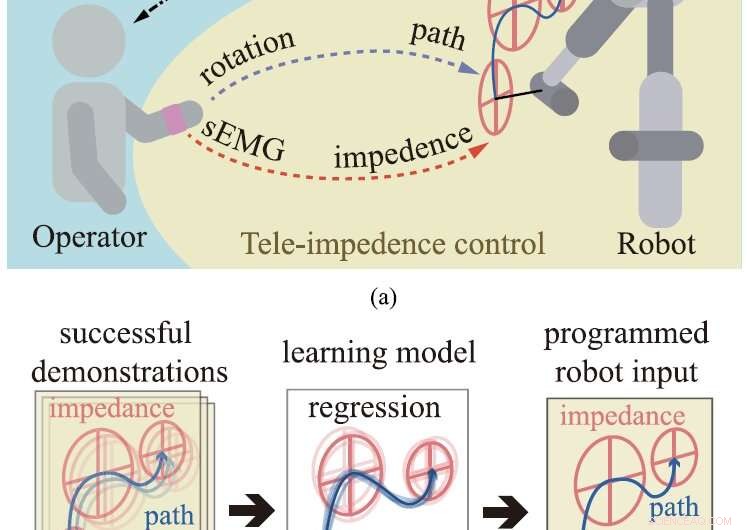
L'équipe de recherche KIST est devenue la première au monde à développer un moyen d'enseigner de nouveaux mouvements à des robots à impédance contrôlée en utilisant des signaux musculaires humains. Avec cette technologie, qui détecte non seulement les mouvements humains mais aussi les contractions musculaires par sEMG, il est désormais possible pour les robots d'imiter des mouvements basés sur des démonstrations humaines.
L'équipe du Dr Kee-hoon Kim a réussi à utiliser le sEMG pour apprendre à un robot à piéger rapidement et adroitement une balle qui tombe rapidement avant qu'elle n'entre en contact avec une surface solide ou ne rebondisse trop loin pour atteindre, de la même manière que les joueurs de football.
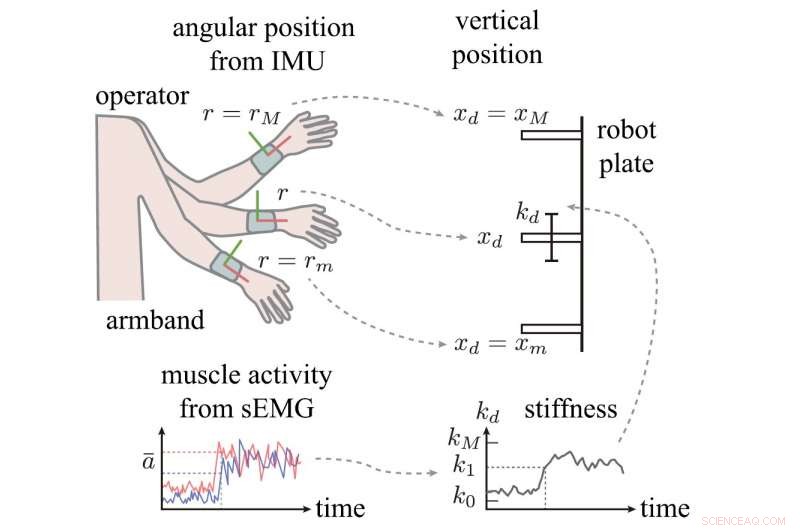
Des capteurs SEMG étaient attachés au bras d'un homme, lui permettant de contrôler simultanément l'emplacement et la flexibilité des mouvements ascendants et descendants rapides du robot. Crédit : Institut coréen des sciences et de la technologie (KIST)
Des capteurs SEMG étaient attachés au bras d'un homme, lui permettant de contrôler simultanément l'emplacement et la flexibilité des mouvements ascendants et descendants rapides du robot. L'homme a ensuite « enseigné » au robot comment piéger une balle tombant rapidement en faisant une démonstration personnelle. Après avoir appris le mouvement, le robot était capable de piéger habilement une balle tombée sans aucune aide extérieure.
Ce résultat de recherche, qui montre que les robots peuvent être intuitivement appris à être flexibles par les humains, a beaucoup attiré l'attention, car il n'a pas été accompli par le calcul numérique ou la programmation des mouvements du robot. Cette étude devrait contribuer à faire avancer l'étude des interactions entre les humains et les robots, nous rapprochant un peu plus d'un monde dans lequel les robots font partie intégrante de notre vie quotidienne.
Kim a dit, "Le résultat de cette recherche, qui se concentre sur l'enseignement des compétences humaines aux robots, est une réalisation importante dans l'étude des interactions entre les humains et les robots."
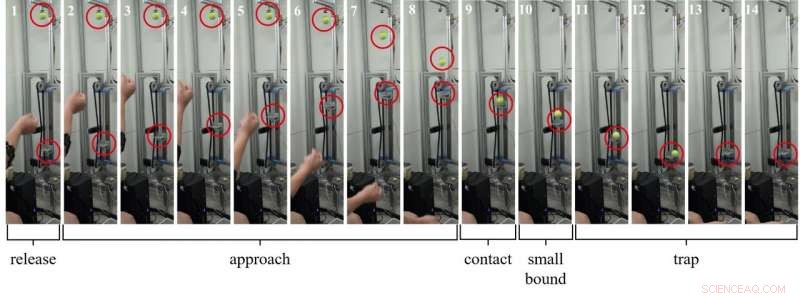
Démonstration d'un robot pour piéger la balle sans codage. Crédit : Institut coréen des sciences et de la technologie (KIST)