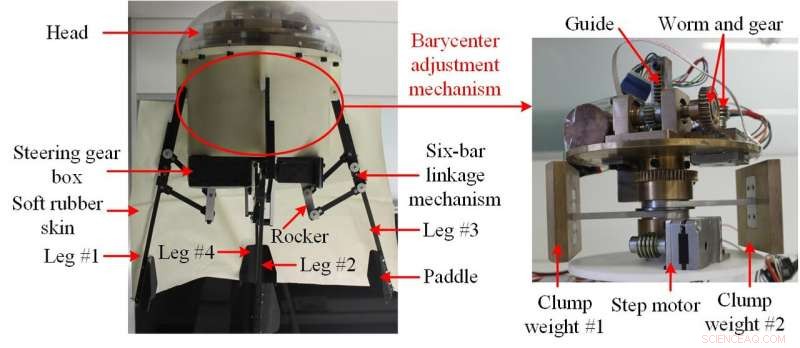
La conception mécanique de la méduse robotisée. Crédit :©Science China Press
En tant que source d'inspiration, créatures aquatiques telles que les poissons, cétacés, et les méduses pourraient inspirer des conceptions innovantes pour améliorer la manière dont les systèmes artificiels fonctionnent et interagissent avec les environnements aquatiques. Les méduses dans la nature se propulsent dans leur environnement en se dilatant et en contractant radialement leur corps en forme de cloche pour pousser l'eau derrière elles, ce qu'on appelle la propulsion par réaction.
Contrairement à l'opinion dominante selon laquelle les méduses sont décrites comme des nageuses inefficaces, les méduses se sont avérées être l'une des nageuses les plus efficaces sur le plan énergétique. C'est-à-dire, il a été démontré que la nage semblable à celle des méduses aura un avantage propulsif remarquable si une propulsion à faible énergie est requise. Par conséquent, les déplacements des méduses ont suscité un intérêt important au cours de la dernière décennie dans le contexte des véhicules sous-marins bioinspirés.
Récemment, chercheurs de l'Institute of Automation, Académie chinoise des sciences à Pékin, La Chine a développé avec succès une nouvelle méduse robotisée capable d'effectuer une propulsion et des manœuvres de type méduse en trois dimensions sur la base d'une méthode basée sur l'apprentissage par renforcement.
Combinant les dernières avancées en matière de conception mécatronique, matériaux, électronique, et méthodes de contrôle, les chercheurs font un effort intégré pour développer des actionneurs intelligents pour fabriquer diverses méduses robotisées. En général, de telles méduses robotisées sont souvent attachées et beaucoup plus lentes en vitesse par rapport à celles actionnées par des moteurs électriques conventionnels. La plupart des méduses robotiques existantes ne peuvent pas ajuster librement leur attitude à trois axes, ce qui a un effet négatif sur la propulsion en nage libre et les applications plausibles.
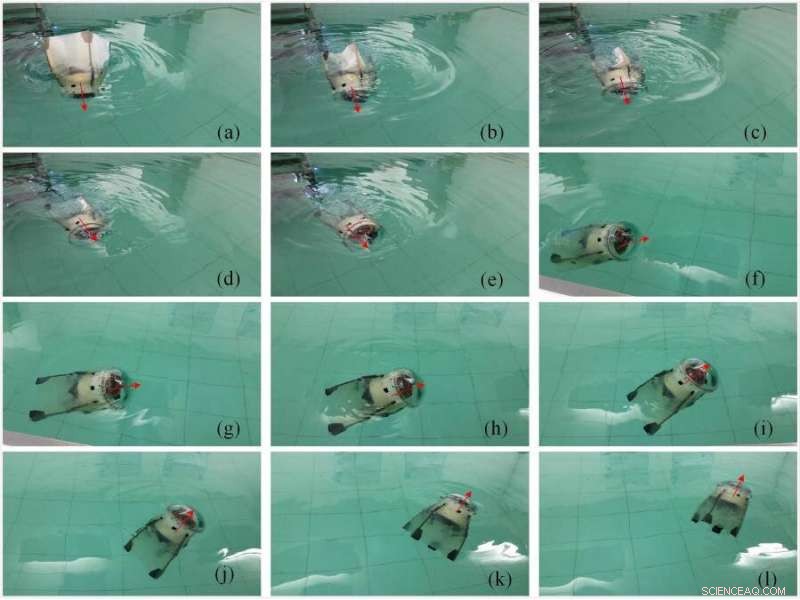
Instantanés de méduses robotisées effectuant un mouvement hybride entremêlant nage verticale et horizontale. Crédit :©Science China Press
Pour résoudre ce problème, le groupe de recherche dirigé par le professeur Junzhi Yu de l'Institute of Automation, Académie chinoise des sciences, a étudié comment un système robotique de type méduse à moteur bio-inspiré capable de mouvement en 3D est conçu et contrôlé.
Les méduses robotisées conçues sont inspirées d'Aurelia aurita (communément appelée méduse lunaire), qui a un déplacement relativement important et est particulièrement adapté pour une utilisation avec une grande capacité de charge. Il mesure environ 138 mm de haut et pèse environ 8,2 kg. Comme illustré à la figure 1, la méduse robotisée est de forme hémisphérique et se compose d'une tête rigide en forme de cloche, une cavité principale cylindrique, quatre mécanismes de liaison séparés à six barres, et une peau en caoutchouc souple. Pour améliorer la maniabilité de la méduse robotisée, un mécanisme de réglage du barycentre assemblé à l'intérieur de la cavité est introduit. En ajustant deux poids de bloc dans le sens vertical ou horizontal ou dans une combinaison des deux, la régulation de l'attitude est atteinte.