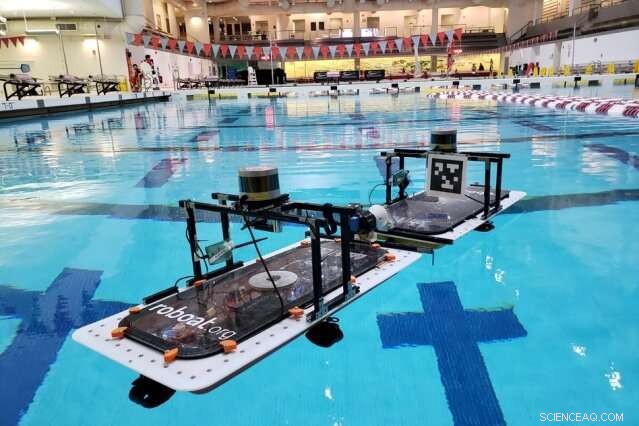
Les chercheurs du MIT ont donné à leur flotte de « robots » autonomes la capacité de se cibler et de s'accrocher automatiquement les uns aux autres – et de continuer à essayer s'ils échouent. Les robots sont conçus pour transporter des personnes, ramasser les ordures, et s'auto-assembler en structures flottantes dans les canaux d'Amsterdam. Crédit :Massachusetts Institute of Technology
La ville d'Amsterdam envisage un avenir où des flottes de bateaux autonomes parcourent ses nombreux canaux pour transporter des marchandises et des personnes, ramasser les ordures, ou s'auto-assembler en scènes et ponts flottants. Pour faire avancer cette vision, Les chercheurs du MIT ont donné de nouvelles capacités à leur flotte de bateaux robotisés - qui sont en cours de développement dans le cadre d'un projet en cours - qui leur permettent de se cibler et de s'accrocher les uns aux autres, et continuez d'essayer s'ils échouent.
Environ un quart de la superficie d'Amsterdam est constitué d'eau, avec 165 canaux serpentant le long des rues animées de la ville. Il y a plusieurs années, Le MIT et l'Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute) se sont associés sur le projet "Roboat". L'idée est de construire une flotte de bateaux robotisés autonomes - coques rectangulaires équipées de capteurs, propulseurs, microcontrôleurs, modules GPS, appareils photo, et d'autres matériels, qui offrent une mobilité intelligente sur l'eau pour soulager les embouteillages dans les rues animées de la ville.
L'un des objectifs du projet est de créer des unités de roboat qui assurent le transport à la demande sur les voies navigables. Un autre objectif est d'utiliser les unités de roboat pour former automatiquement des structures "pop-up", comme les passerelles piétonnes, étapes de performance, ou même les marchés alimentaires. Les structures pourraient alors se désassembler automatiquement à des heures définies et se reformer en structures cibles pour différentes activités. En outre, les unités de roboat pourraient être utilisées comme capteurs agiles pour collecter des données sur les infrastructures de la ville, et la qualité de l'air et de l'eau, entre autres.
En 2016, Des chercheurs du MIT ont testé un prototype de roboat qui naviguait sur les canaux d'Amsterdam, avancer, en arrière, et latéralement le long d'un chemin préprogrammé. L'année dernière, des chercheurs conçus à faible coût, imprimé en 3D, des versions à l'échelle quart des bateaux, qui étaient plus efficaces et agiles, et est venu équipé d'algorithmes avancés de suivi de trajectoire.
Dans un article présenté à la Conférence internationale sur la robotique et l'automatisation, les chercheurs décrivent des unités de roboat qui peuvent désormais identifier et se connecter aux stations d'accueil. Des algorithmes de contrôle guident les robots vers la cible, où ils se connectent automatiquement à un mécanisme de verrouillage personnalisé avec une précision millimétrique. De plus, le roboat remarque s'il a raté la correspondance, sauvegarde, et réessaye.
Les chercheurs ont testé la technique de verrouillage dans une piscine du MIT et dans la Charles River, où les eaux sont plus agitées. Dans les deux cas, les unités de roboat étaient généralement capables de se connecter avec succès en environ 10 secondes, à partir d'environ 1 mètre, ou ils ont réussi après quelques tentatives infructueuses. A Amsterdam, le système pourrait être particulièrement utile pour la collecte des ordures pendant la nuit. Les unités de Roboat pouvaient naviguer autour d'un canal, localiser et verrouiller les plates-formes contenant les conteneurs à déchets, et les ramener aux installations de collecte.
« À Amsterdam, les canaux étaient autrefois utilisés pour le transport et d'autres choses pour lesquelles les routes sont maintenant utilisées. Les routes à proximité des canaux sont maintenant très encombrées - et ont du bruit et de la pollution - donc la ville veut ajouter plus de fonctionnalités aux canaux, " dit le premier auteur Luis Mateos, un étudiant diplômé du Département d'études et de planification urbaines (DUSP) et chercheur au MIT Senseable City Lab. "Les technologies de conduite autonome peuvent faire gagner du temps, coûts et énergie, et améliorer la ville en allant de l'avant."
"L'objectif est d'utiliser des unités de roboat pour donner vie à de nouvelles capacités sur l'eau, " ajoute la co-auteur Daniela Rus, directeur du Laboratoire d'informatique et d'intelligence artificielle (CSAIL) et professeur Andrew et Erna Viterbi de génie électrique et d'informatique. "The new latching mechanism is very important for creating pop-up structures. Roboat does not need latching for autonomous transportation on water, but you need the latching to create any structure, whether it's mobile or fixed."
Joining Mateos on the paper are:Wei Wang, a joint postdoc in CSAIL and the Senseable City Lab; Banti Gheneti, a graduate student in the Department of Electrical Engineering and Computer Science; Fabio Duarte, a DUSP and Senseable City Lab research scientist; and Carlo Ratti, director of the Senseable City Lab and a principal investigator and professor of the practice in DUSP.
Making the connection
Each roboat is equipped with latching mechanisms, including ball and socket components, on its front, arrière, et côtés. The ball component resembles a badminton shuttlecock—a cone-shaped, rubber body with a metal ball at the end. The socket component is a wide funnel that guides the ball component into a receptor. Inside the funnel, a laser beam acts like a security system that detects when the ball crosses into the receptor. That activates a mechanism with three arms that closes around and captures the ball, while also sending a feedback signal to both roboats that the connection is complete.
On the software side, the roboats run on custom computer vision and control techniques. Each roboat has a LIDAR system and camera, so they can autonomously move from point to point around the canals. Each docking station—typically an unmoving roboat—has a sheet of paper imprinted with an augmented reality tag, called an AprilTag, which resembles a simplified QR code. Commonly used for robotic applications, AprilTags enable robots to detect and compute their precise 3-D position and orientation relative to the tag.
Both the AprilTags and cameras are located in the same locations in center of the roboats. When a traveling roboat is roughly one or two meters away from the stationary AprilTag, the roboat calculates its position and orientation to the tag. Typiquement, this would generate a 3-D map for boat motion, including roll, pitch, and yaw (left and right). But an algorithm strips away everything except yaw. This produces an easy-to-compute 2-D plane that measures the roboat camera's distance away and distance left and right of the tag. En utilisant ces informations, the roboat steers itself toward the tag. By keeping the camera and tag perfectly aligned, the roboat is able to precisely connect.
The funnel compensates for any misalignment in the roboat's pitch (rocking up and down) and heave (vertical up and down), as canal waves are relatively small. Si, cependant, the roboat goes beyond its calculated distance, and doesn't receive a feedback signal from the laser beam, it knows it has missed. "In challenging waters, sometimes roboat units at the current one-quarter scale, are not strong enough to overcome wind gusts or heavy water currents, " Mateos says. "A logic component on the roboat says, "You missed, so back up, recalculate your position, and try again.""
Future iterations
The researchers are now designing roboat units roughly four times the size of the current iterations, so they'll be more stable on water. Mateos is also working on an update to the funnel that includes tentacle-like rubber grippers that tighten around the pin—like a squid grasping its prey. That could help give the roboat units more control when, dire, they're towing platforms or other roboats through narrow canals.
In the works is also a system that displays the AprilTags on an LCD monitor that changes codes to signal multiple roboat units to assemble in a given order. En premier, all roboat units will be given a code to stay exactly a meter apart. Puis, the code changes to direct the first roboat to latch. After, the screen switches codes to order the next roboat to latch, etc. "It's like the telephone game. The changing code passes a message to one roboat at a time, and that message tells them what to do, " Mateos says.
Darwin Caldwell, the research director of Advanced Robotics at the Italian Institute of Technology, envisions even more possible applications for the autonomous latching capability. "I can certainly see this type of autonomous docking being of use in many areas of robotic refueling and docking … beyond aquatic/naval systems, " il dit, "including inflight refueling, space docking, cargo container handling, [and] robot in-house recharging."
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.