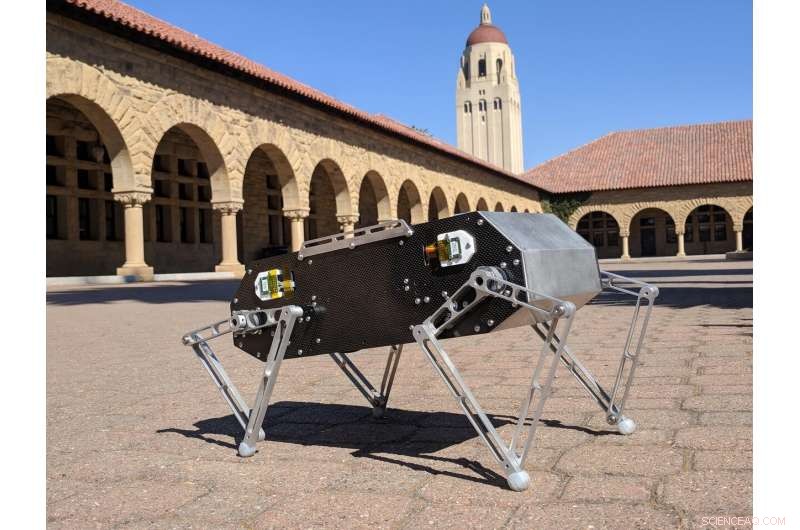
Chien de Stanford. Crédit :Kau et al.
Des chercheurs de l'Université de Stanford ont récemment créé un robot quadrupède open source appelé Stanford Doggo. Leur robot, présenté dans un article pré-publié sur arXiv et qui sera publié par IEEE Explorer , dépasse les performances de nombreux robots à pattes de pointe en agilité de saut vertical.
« Il y a environ un an et demi, J'ai démarré la sous-équipe Extreme Mobility chez Stanford Student Robotics, " Nathan Kau, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. « Nous étions intéressés par la construction de robots agiles capables d'explorer des environnements où les véhicules à roues ou volants ne seraient pas efficaces. Il existe déjà quelques robots vraiment étonnants pouvant fonctionner dans ces types d'environnements, mais ils étaient assez chers, des conceptions personnalisées que nous ne serions pas en mesure de reproduire. Alors l'année dernière, nous avons entrepris de concevoir et de prototyper un robot à quatre pattes peu coûteux inspiré de ces groupes, et Stanford Doggo est le résultat de nos efforts."
Le robot développé par Kau et ses collègues a quatre pattes, dont chacun est alimenté par deux moteurs. Les entraînements par courroie relient les moteurs aux axes des tringleries de jambes, ce qui fait tourner les maillons au tiers de la vitesse des moteurs. Cette réduction de vitesse triple presque le couple, et le rapport est suffisamment bas pour garantir que les forces de l'environnement sont détectées par le moteur.
"Cet effet est similaire à la conduite d'un vélo à faible vitesse, et il est plus facile de sentir des bosses sur la route dans vos pieds qu'à haute vitesse, " expliqua Kau. " Ce genre de mécanismes, appelés actionneurs à entraînement quasi direct, sont quelque peu courants maintenant chez les robots à pattes. Cependant, nous avons constaté que peu ou pas de groupes utilisaient ce type d'actionneur sur de plus petits, robots marcheurs à bas prix."
Stanford Doggo est un robot très agile et peu coûteux qui peut être facilement reproduit. Remarquablement, le robot a établi un nouveau record d'agilité de saut vertical parmi n'importe quel robot ou animal, doublant la hauteur de saut des robots quadrupèdes précédents. Stanford Doggo est également beaucoup moins cher que les autres robots à pattes, qui coûtent généralement des dizaines ou des centaines de milliers de dollars.
"Au total, Stanford Doggo coûte environ 3000 USD à construire, y compris tous les coûts de fabrication que vous auriez encourus si vous ne disposiez pas de machines-outils coûteuses telles que des fraises ou des tours, " a déclaré Kau. " Le faible coût signifie que le robot est plus accessible aux autres, surtout s'ils ne sont pas dans un laboratoire universitaire. Sa caractéristique la plus importante, cependant, est qu'il fonctionne sur du matériel et des logiciels open source et que nous avons publié des plans détaillés, listes de pièces et instructions."
Dans une série d'évaluations réalisées par Kau et ses collègues, Stanford a surpassé les autres robots quadrupèdes par une marge significative. Son agilité de saut vertical, une mesure de la vitesse verticale moyenne, égalait celui de l'animal le plus agile et surpassait celui du robot à pattes le plus performant de 22%. Plusieurs autres robots intéressants sont actuellement en cours de développement, si bientôt les titres de Stanford Doggo pourraient changer. Néanmoins, son agilité en saut vertical reste très remarquable.
"Nous espérons que de plus en plus de laboratoires pourront tester de nouvelles techniques de contrôle en utilisant notre robot comme plate-forme, " a déclaré Kau. "Nous pensons que si plus de gens travaillent sur ces types de robots, ils seront prêts plus rapidement pour des applications réelles telles que la livraison de fournitures essentielles ou la recherche et le sauvetage. Nous espérons également que notre robot incitera les étudiants à commencer à explorer le domaine de la robotique à pattes. C'est généralement un domaine coûteux de la robotique dans lequel travailler, nous espérons donc que Stanford Doggo abaissera la barrière à l'entrée."
Kau et ses collègues ont réussi à développer le tout premier robot quadrupède peu coûteux et très agile conçu pour des applications de recherche. Stanford Doggo est entièrement open-source et est construit en utilisant très peu de pièces personnalisées, ainsi il peut être facilement recréé. Les chercheurs espèrent que d'autres équipes de robotique s'appuieront sur et amélioreront leur robot, faire avancer leurs recherches.
Kau et ses collègues travaillent également sur une version plus grande de Stanford Doggo, appelé Stanford Woofer. Stanford Woofer est environ deux fois plus grand que Doggo et peut transporter environ 6 kg d'équipement supplémentaire, tels que des capteurs et un bras robotique.
"Stanford Doggo est toujours un projet en cours, " Kau a ajouté. " Par exemple, nous travaillons à l'intégration d'une suite complète de capteurs sur le robot, y compris LIDAR. Un autre sous-projet consiste à rendre le robot un peu moins nu et plus accessible, d'autant plus que nous pensons que cela pourrait être une plate-forme efficace pour l'éducation et la sensibilisation. Nous écrivons également un Instructable complet pour compléter nos matériaux open source existants, qui donne des instructions étape par étape sur la façon de construire votre propre Stanford Doggo."
© 2019 Réseau Science X