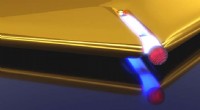
Un petit, L'actionneur souple fait de métaux liquides et de polymères flexibles est l'analogue souple d'un moteur électromagnétique. Cette image est apparue sur la couverture de Matériaux fonctionnels avancés . Crédit :Université de Californie - Santa Barbara
Dans le monde de la robotique, les robots mous sont les nouveaux enfants du quartier. Les capacités uniques de ces automates sont de se plier, déformer, s'étirer, tordre ou serrer de toutes les manières que les robots rigides conventionnels ne peuvent pas.
Aujourd'hui, il est facile d'imaginer un monde dans lequel les humains et les robots collaborent – à proximité immédiate – dans de nombreux domaines. Les robots souples émergents peuvent aider à garantir que cela peut être fait en toute sécurité, et d'une manière qui se synchronise avec les environnements humains ou même des interfaces avec les humains eux-mêmes.
"Certains des avantages des systèmes robotiques souples sont qu'ils peuvent facilement s'adapter à des environnements non structurés, ou sur des surfaces irrégulières ou molles, comme le corps humain, ", a déclaré Yon Visell, professeur de génie électrique et informatique à l'UC Santa Barbara.
Malgré leur promesse, à ce jour, la plupart des robots mous se déplacent lentement et maladroitement par rapport à de nombreux robots conventionnels. Cependant, l'écart se réduit grâce aux nouveaux développements de l'unité fondamentale du mouvement robotique :l'actionneur. Responsable du mouvement mécanique d'un mécanisme ou d'une machine, les actionneurs font leur travail de diverses manières, s'appuyant sur l'électromagnétisme, piézoélectrique, pneumatiques ou autres.
Maintenant, Visell et ses collaborateurs de l'UCSB ont marié les entraînements électromagnétiques utilisés dans la plupart des systèmes robotiques conventionnels avec des matériaux souples, afin d'obtenir à la fois vitesse et douceur. "Un analogue biologique intéressant de l'actionneur décrit dans notre nouveau travail pourrait être un muscle à contraction rapide, " dit Visell, qui, avec Thuc-Quyen Nguyen, professeur de chimie et de biochimie à l'UCSB, et post-doctorants Thanh Nho Do et Hung Phan, est l'auteur de l'article "Soft Electromagnetic Actuators for Robotic Applications". L'article fait la couverture de la revue Matériaux fonctionnels avancés .
Le principal défi pour Visell et ses collègues était de construire un actionneur capable d'atteindre des vitesses supérieures à ce qui était généralement possible avec des actionneurs robotiques souples, dont beaucoup dépendent de processus lents, tels que le flux d'air ou les effets thermiques.
"Dans ce projet, on voulait voir jusqu'où on pouvait pousser l'idée d'avoir très vite, actionnement à basse tension dans un paradigme robotique entièrement doux, " dit-il. Ils ont basé leur travail sur le moteur électromagnétique, un type courant d'actionneur rapide et basse tension qui est utilisé dans tout, des voitures électriques aux appareils électroménagers, mais a vu peu d'applications efficaces dans les systèmes robotiques mous.
Le travail de l'équipe a abouti à un type d'actionneur rapide, basse tension et doux - et aussi remarquablement petit, à peine quelques millimètres. Utilisation unique, conducteurs en alliage de métal liquide enrobés de fibres polymères creuses et de composites polymères magnétisés, les chercheurs ont créé des motifs, composants tridimensionnels qui constituent la base des analogues souples des moteurs électriques standard. Les fibres elles-mêmes sont des composites polymères que l'équipe a conçus pour avoir une conductivité thermique élevée, améliorant considérablement leurs performances.
"Nous avons réalisé des composants à la fois souples et extensibles, et les a combinés pour créer ces structures motrices qui peuvent déplacer les choses, " a déclaré Visell. Pour démontrer, ils ont créé un petit, pince de quelques millimètres de large qui peut se fermer en quelques millisecondes, et un stimulateur tactile doux qui peut fonctionner à des fréquences de centaines de cycles par seconde.
Ces dispositifs pourraient trouver une utilisation dans des domaines émergents tels que l'haptique, où le retour tactile est recherché pour des applications incluant la réalité virtuelle et, bien sûr le proche parent de l'haptique :la robotique douce. "Ces actionneurs électromagnétiques souples peuvent être utilisés pour créer des écrans tactiles conformes à la peau humaine, ou des outils robotiques miniatures pour l'endoscopie chirurgicale ou d'autres applications médicales, " a déclaré le post-doctorant Thanh Nho Do.
"Nous sommes impatients d'appliquer ces nouvelles technologies de robotique douce dans des domaines allant de la réalité virtuelle, réalité augmentée, technologies portables, santé et médecine, " a déclaré Visell. " L'horizon est grand ouvert. "