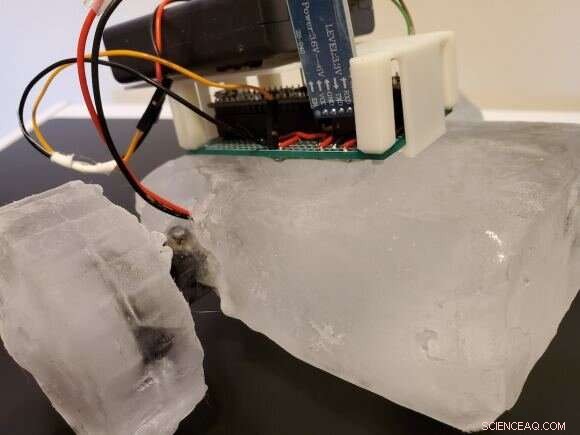
L'IceBot n'est qu'un concept pour le moment, avec certaines parties structurelles en glace. Crédit :GRASP Lab
Certaines des cibles les plus alléchantes de l'exploration spatiale sont les mondes de glace gelés. Prenez la lune de Jupiter Europe, par exemple. C'est chaud, l'océan souterrain salé est enfoui sous une couche de glace à l'échelle de la lune. Quelle est la meilleure façon de l'explorer?
Peut-être qu'un robot de glace pourrait jouer un rôle.
Bien que les agences spatiales mondiales, en particulier la NASA, s'améliorent de plus en plus dans la construction de robots pour explorer des endroits comme Mars, ces robots ont des limites. La principale de ces limitations est peut-être la possibilité de panne. Une fois qu'un rover sur Mars - ou quelque part encore plus éloigné - tombe en panne, c'est fini. Il n'y a aucun moyen possible de réparer quelque chose comme MSL Curiosity s'il tombe en panne lors de l'exploration de la surface martienne.
Mais et si le monde exploré était un monde gelé, et le robot était fait de glace ? Les robots glacés pourraient-ils s'auto-réparer, même de façon limitée ? Pourraient-ils réellement y être fabriqués et assemblés, même en partie ?
Un article récent intitulé « Robots Made From Ice :An Analysis of Manufacturing Techniques » a exploré cette possibilité. Le document a été présenté à la conférence internationale 2020 IEEE (Institute for Electrical and Electronics Engineers) sur la robotique et les systèmes. Devin Carroll et Mark Yim l'ont écrit. Carroll est titulaire d'un doctorat. étudiant en robotique à l'Université de Pennsylvanie, et Yim est le directeur du Grasp Lab et professeur de génie mécanique dans la même institution.
Le robot entier ne serait pas fait de glace, évidemment. Mais une partie de la structure pourrait l'être. L'idée est centrée sur une conception modulaire qui pourrait s'auto-réparer ou même s'auto-répliquer et pourrait être complétée in situ après le déploiement, une fois que les obstacles du terrain et les détails des tâches de la mission étaient mieux compris.
Dans leur résumé, écrivent les deux auteurs, "La glace permet une flexibilité accrue dans la conception du système, permettant de concevoir et de construire la structure robotique post-déploiement après que les tâches et les obstacles du terrain aient été mieux identifiés et analysés."
Évidemment, il y a beaucoup de problèmes et d'obstacles avec cette technologie potentielle. Mais c'est comme ça qu'ils commencent tous.
Les deux auteurs précisent qu'il s'agit d'un travail préliminaire. « Les auteurs explorent une approche axée sur la structure pour examiner les processus de fabrication compatibles en mettant l'accent sur la conservation des énergies de processus, " écrivent-ils. " Une plate-forme robotique mobile fabriquée à partir de glace est présentée comme une preuve de concept et une première démonstration. "
L'idée est centrée sur un rover à deux roues nommé Icebot. Icebot est basé sur la conception des rovers antarctiques et comporte des éléments structurels en glace.
Dans leur travail, la paire d'auteurs a effectué des expériences pour explorer l'ensemble de l'idée. Le travail reposait sur deux hypothèses :
Leur article présente également trois principes généraux de conception.
Il y a une autre condition primordiale dans tout cela, trop. Pour les robots opérant sur d'autres mondes, l'énergie est une denrée précieuse. Chaque mission dispose d'un budget énergétique qui est méticuleusement géré. Prenez le vaisseau spatial Voyager, par exemple. Leur impressionnante longévité est due au moins en partie à une utilisation extrêmement scrupuleuse de l'énergie. La quantité d'énergie qu'un robot de glace utilise pour se fabriquer et se construire est donc critique.
Compte tenu de ces conditions, les chercheurs ont proposé des idées intéressantes.
Tout d'abord, l'ensemble du scénario impliquerait probablement non pas un seul robot mais une paire, fonctionnant en tandem. Une unité serait le véhicule d'exploration principal, et l'autre serait un peu comme un vaisseau-mère et aurait les capacités de fabrication et de réparation.
Dans une interview avec le Spectre IEEE , Devin Carroll a expliqué à quoi cela pourrait ressembler. « Quand je pense à un robot d'exploration de l'Arctique (ou planétaire) qui intègre des capacités d'auto-modification ou de réparation, j'imagine un système avec deux types de robots :le premier explore l'environnement et collecte les matériaux nécessaires à l'auto-augmentation ou à la réparation, et le second est une sorte de manipulateur/système de fabrication. Nous pouvons imaginer que la classe d'exploration du robot retourne à un emplacement centralisé avec une demande de charrue ou d'une autre augmentation et le système de fabrication pourra attacher l'augmentation directement au robot."
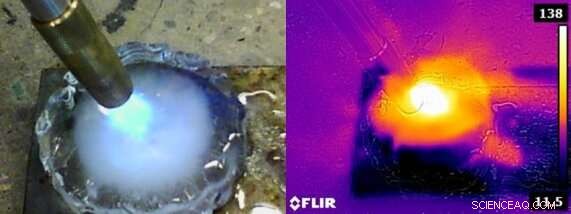
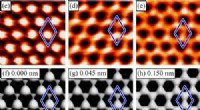
Les chercheurs ont testé une flamme nue comme méthode pour faire fondre des trous dans la glace dans lesquels l'actionneur du robot doit être inséré. À gauche :Un chalumeau au butane est utilisé pour faire fondre un trou dans le blanc de glace. À droite :une carte thermique (en degrés C) de la torche au butane et du blanc de glace. Crédit :Carroll et Yim, 2020
La paire de scientifiques a effectué quelques tests pour étoffer leurs idées. Ils ont examiné différentes façons de manipuler la glace. Pour la fabrication, ils ont regardé le moulage, où la glace serait d'abord fondue puis versée dans un moule à façonner. Ils se sont également penchés sur l'impression 3D, et l'usinage. Chaque méthode a ses avantages et ses inconvénients, et chacun a des besoins énergétiques différents.
Ils ont également examiné l'intégration des actionneurs. Comme expliqué, les actionneurs eux-mêmes ne peuvent pas être faits de glace. Les actionneurs sont exposés à différentes contraintes, la glace ne peut pas le supporter. L'intégration des actionneurs avec des composants en glace est donc une opération critique.
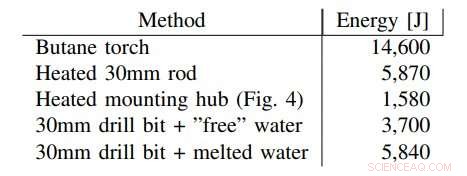
Ils ont expérimenté quatre manières différentes d'intégrer des actionneurs :
Chacune des méthodes a ses forces et ses faiblesses. Chacun a également ses propres besoins énergétiques. Le tableau ci-dessous présente l'énergie nécessaire pour chaque méthode pour créer une poche de montage pour l'actionneur, et de le congeler en place.
Comme il s'agit de travaux préliminaires, l'équipe n'est parvenue à aucune conclusion permanente. Mais leurs expériences ont révélé certains pièges qui devront être surmontés si la fabrication et la réparation de glace in situ doivent un jour être mises en œuvre efficacement.
Ils ont constaté que la surface de l'attachement est essentielle pour le succès, ce qui n'est pas une surprise. En un mot, une plus grande surface dans l'articulation est meilleure, et aide la glace à résister aux contraintes dues au couple et à d'autres forces. L'épaisseur de la glace était également un problème, ce qui n'est pas surprenant non plus.
Les auteurs résument leur travail dans la conclusion de l'article. "Ce travail est un pas vers un poids léger, système robotique adaptable capable de fonctionner dans des environnements sous zéro. Ce système se prête à l'auto-reconfiguration, auto-réplication et auto-réparation, " ils écrivent.
"Pour pousser vers le développement de méthodes automatisées pour la création et l'assemblage de ce système, nous prévoyons de poursuivre un module commun qui peut être facilement intégré avec des blocs de glace passifs, " écrivent-ils. Cela rendrait le système IceBot plus simple et plus modulaire.
Ils ont également expliqué ce que l'avenir réserve à leur concept IceBot :« Les futurs travaux supplémentaires comprennent :la détermination d'une classe générale de surface sur laquelle ce système peut se déplacer, méthodes d'utilisation des éléments de glace pour interagir avec l'environnement, et une enquête plus approfondie sur les limites de résistance des connexions entre les actionneurs et la glace."
Dans le Spectre IEEE entretien, Carroll a également parlé de l'avenir de leurs efforts IceBot et a souligné le besoin de modularité. « Mon objectif immédiat est de concevoir un joint modulaire que nous pouvons utiliser pour joindre facilement et en toute sécurité des actionneurs à des blocs de glace, ainsi que de travailler au développement d'un effecteur final qui nous permettra de manipuler des blocs de glace sans les déformer de façon permanente via des trous de vis ou d'autres , méthodes de connexion similaires."
Il y a beaucoup de travail à faire avant qu'une technologie de robotique sur glace puisse être mise en œuvre. Mais c'est un développement alléchant, et Europe et Encelade attendent. Des agences comme la NASA examinent de près les ressources in situ pour leurs missions sur la Lune et sur Mars.
La glace est courante dans le système solaire. L'espace est glacial, et de nombreux corps sont couverts de glace. Un IceBot in-situ pourrait-il être dans le futur ?