Le programme MAARS (Machine Learning-based Analytics for Autonomous Rover Systems) englobe un éventail de domaines où l'intelligence artificielle pourrait être utile. L'équipe a présenté les résultats du projet MAARS à la conférence IEEE Aerospace en mars 2020. Le projet a été finaliste pour le NASA Software Award. Crédit :NASA JPL
Les rovers martiens de la NASA ont été l'un des grands succès scientifiques et spatiaux des deux dernières décennies.
Quatre générations de rovers ont parcouru la planète rouge pour recueillir des données scientifiques, renvoyer des photographies évocatrices, et survivre à des conditions incroyablement difficiles, le tout en utilisant des ordinateurs de bord moins puissants qu'un iPhone 1. Le dernier rover, Persévérance, a été lancé le 30 juillet 2020, et les ingénieurs rêvent déjà d'une future génération de rovers.
Bien qu'il s'agisse d'une réalisation majeure, ces missions n'ont fait qu'effleurer la surface (au propre comme au figuré) de la planète et de sa géologie, géographie, et ambiance.
"La superficie de Mars est approximativement la même que la superficie totale de la terre sur Terre, " a déclaré Masahiro (Hiro) Ono, chef de groupe du Robotic Surface Mobility Group au Jet Propulsion Laboratory (JPL) de la NASA - qui a dirigé toutes les missions du rover Mars - et l'un des chercheurs qui a développé le logiciel qui permet au rover actuel de fonctionner.
"Imaginer, vous êtes un extraterrestre et vous ne savez presque rien de la Terre, et vous atterrissez sur sept ou huit points sur Terre et parcourez quelques centaines de kilomètres. Cette espèce extraterrestre en sait-elle assez sur la Terre ? » Demanda Ono. « Non. Si nous voulons représenter l'immense diversité de Mars, nous aurons besoin de plus de mesures au sol, et la clé est à distance sensiblement étendue, en espérant couvrir des milliers de kilomètres."
Voyager à travers la diversité de Mars, terrain dangereux avec une puissance de calcul limitée et un régime énergétique restreint - seulement autant de soleil que le rover peut capturer et convertir en énergie en un seul jour martien, ou sol—est un énorme défi.
Le premier rover, Séjournant, couvert 330 pieds sur 91 sols; la deuxième, Esprit, parcouru 4,8 milles en cinq ans environ; Opportunité, parcouru 28 milles en 15 ans; et Curiosity a parcouru plus de 12 milles depuis son atterrissage en 2012.
"Notre équipe travaille sur l'autonomie des robots de Mars pour rendre les futurs rovers plus intelligents, pour renforcer la sécurité, pour améliorer la productivité, et en particulier pour rouler plus vite et plus loin, " dit Ono.
Nouveau matériel, Nouvelles possibilités
Le rover Persévérance, qui a été lancé cet été, calcule à l'aide des RAD 750, des ordinateurs monocartes résistants aux radiations fabriqués par BAE Systems Electronics.
Missions futures, cependant, utiliserait potentiellement de nouvelles hautes performances, processeurs multicœurs durcis aux radiations conçus dans le cadre du projet High Performance Spaceflight Computing (HPSC). (Le processeur Snapdragon de Qualcomm est également testé pour des missions.) Ces puces fourniront environ cent fois la capacité de calcul des processeurs de vol actuels en utilisant la même quantité d'énergie.
"Toute l'autonomie que vous voyez sur notre dernier rover Mars est en grande partie humaine dans la boucle", ce qui signifie qu'elle nécessite une interaction humaine pour fonctionner, selon Chris Mattmann, le directeur adjoint de la technologie et de l'innovation au JPL. "Cela s'explique en partie par les limites des processeurs qui les utilisent. L'une des missions principales de ces nouvelles puces est de faire de l'apprentissage en profondeur et de l'apprentissage automatique, comme nous le faisons terrestrement, à bord. Quelles sont les applications qui tuent étant donné ce nouvel environnement informatique ?"
Le programme MAARS (Machine Learning-based Analytics for Autonomous Rover Systems), qui a débuté il y a trois ans et se terminera cette année, englobe un éventail de domaines où l'intelligence artificielle pourrait être utile. L'équipe a présenté les résultats du projet MAARS à la conférence hIEEE Aerospace en mars 2020. Le projet a été finaliste pour le NASA Software Award.
« Le calcul haute performance terrestre a permis des avancées incroyables dans la navigation autonome des véhicules, apprentissage automatique, et l'analyse des données pour les applications terrestres, " a écrit l'équipe dans son article de l'IEEE. " Le principal obstacle au déploiement de telles avancées dans l'exploration de Mars est que les meilleurs ordinateurs sont sur Terre, tandis que les données les plus précieuses se trouvent sur Mars."
Former des modèles d'apprentissage automatique sur le supercalculateur Maverick2 au Texas Advanced Computing Center (TACC), ainsi que sur les clusters Amazon Web Services et JPL, Ono, Mattmann et leur équipe ont développé deux nouvelles capacités pour les futurs rovers martiens, qu'ils appellent Drive-By Science et Energy-Optimal Autonomous Navigation.
Navigation autonome optimisée en énergie
Ono faisait partie de l'équipe qui a écrit le logiciel de recherche de chemin embarqué pour Persévérance. Le logiciel de Perseverance inclut des capacités d'apprentissage automatique, mais la façon dont il fait la recherche de chemin est encore assez naïve.
"Nous aimerions que les futurs rovers aient une capacité humaine à voir et à comprendre le terrain, " dit Ono. " Pour les rovers, l'énergie est très importante. Il n'y a pas d'autoroute goudronnée sur Mars. La maniabilité varie considérablement en fonction du terrain, par exemple la plage par rapport à. substrat rocheux. Ce n'est pas envisagé actuellement. Coming up with a path with all of these constraints is complicated, but that's the level of computation that we can handle with the HPSC or Snapdragon chips. But to do so we're going to need to change the paradigm a little bit."
Ono explains that new paradigm as commanding by policy, a middle ground between the human-dictated:"Go from A to B and do C, " and the purely autonomous:"Go do science."
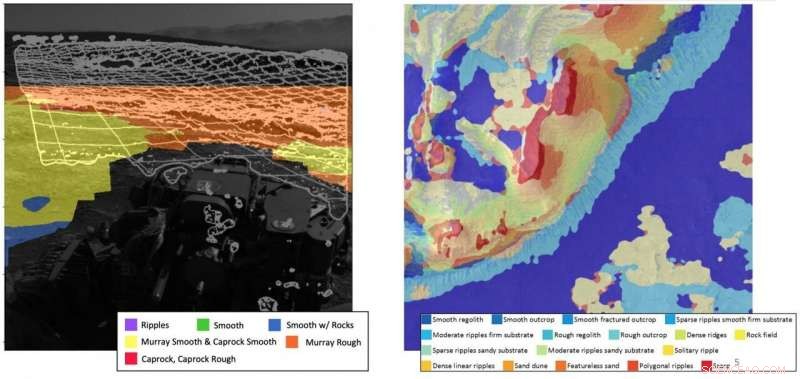
The public tool AI4Mars shows different kinds of Martian terrain as seen by NASA's Curiosity rover. By drawing borders around terrain features and assigning one of four labels to them, users can help train an algorithm that will automatically identify favorable and hazardous terrain for Curiosity's rover planners. Crédit :NASA/JPL-Caltech
Commanding by policy involves pre-planning for a range of scenarios, and then allowing the rover to determine what conditions it is encountering and what it should do.
"We use a supercomputer on the ground, where we have infinite computational resources like those at TACC, to develop a plan where a policy is:if X, then do this; if y, then do that, " Ono explained. "We'll basically make a huge to-do list and send gigabytes of data to the rover, compressing it in huge tables. Then we'll use the increased power of the rover to de-compress the policy and execute it."
The pre-planned list is generated using machine learning-derived optimizations. The on-board chip can then use those plans to perform inference:taking the inputs from its environment and plugging them into the pre-trained model. The inference tasks are computationally much easier and can be computed on a chip like those that may accompany future rovers to Mars.
"The rover has the flexibility of changing the plan on board instead of just sticking to a sequence of pre-planned options, " Ono said. "This is important in case something bad happens or it finds something interesting."
Drive-By Science
Current Mars missions typically use tens of images a Sol from the rover to decide what to do the next day, according to Mattmann. "But what if in the future we could use one million image captions instead? That's the core tenet of Drive-By Science, " he said. "If the rover can return text labels and captions that were scientifically validated, our mission team would have a lot more to go on."
Mattmann and the team adapted Google's Show and Tell software—a neural image caption generator first launched in 2014—for the rover missions, the first non-Google application of the technology.
The algorithm takes in images and spits out human-readable captions. These include basic, but critical information, like cardinality—how many rocks, how far away?—and properties like the vein structure in outcrops near bedrock. "The types of science knowledge that we currently use images for to decide what's interesting, " Mattmann said.
Over the past few years, planetary geologists have labeled and curated Mars-specific image annotations to train the model.
"We use the one million captions to find 100 more important things, " Mattmann said. "Using search and information retrieval capabilities, we can prioritize targets. Humans are still in the loop, but they're getting much more information and are able to search it a lot faster."
Results of the team's work appear in the September 2020 issue of Sciences planétaires et spatiales .
TACC's supercomputers proved instrumental in helping the JPL team test the system. On Maverick 2, the team trained, validated, and improved their model using 6, 700 labels created by experts.
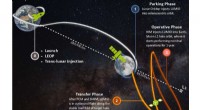
The ability to travel much farther would be a necessity for future Mars rovers. An example is the Sample Fetch Rover, proposed to be developed by the European Space Association and launched in late 2020s, whose main task will be to pick up samples dug up by the Mars 2020 rover and collect them.
"Those rovers in a period of years would have to drive 10 times further than previous rovers to collect all the samples and to get them to a rendezvous site, " Mattmann said. "We'll need to be smarter about the way we drive and use energy."
Before the new models and algorithms are loaded onto a rover destined for space, they are tested on a dirt training ground next to JPL that serves as an Earth-based analog for the surface of Mars.
The team developed a demonstration that shows an overhead map, streaming images collected by the rover, and the algorithms running live on the rover, and then exposes the rover doing terrain classification and captioning on board. They had hoped to finish testing the new system this spring, but COVID-19 shuttered the lab and delayed testing.
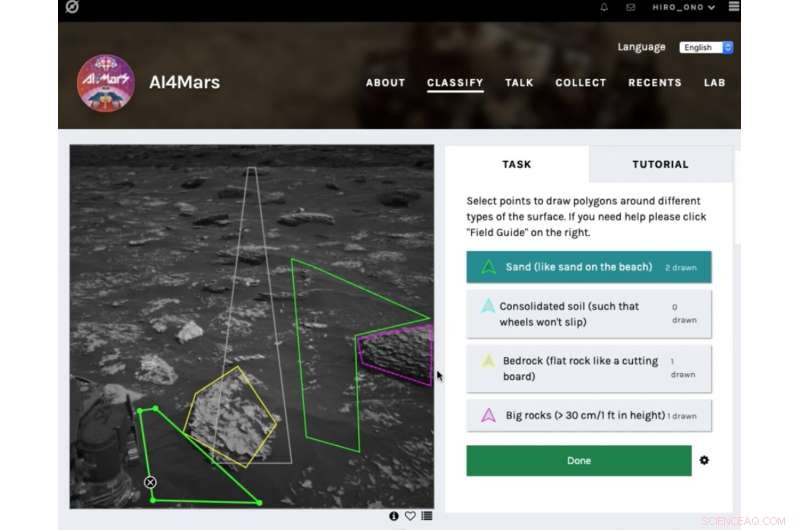
En attendant, Ono and his team developed a citizen science app, AI4Mars, that allows the public to annotate more than 20, 000 images taken by the Curiosity rover. These will be used to further train machine learning algorithms to identify and avoid hazardous terrains.
The public have generated 170, 000 labels so far in less than three months. "People are excited. It's an opportunity for people to help, " Ono said. "The labels that people create will help us make the rover safer."
The efforts to develop a new AI-based paradigm for future autonomous missions can be applied not just to rovers but to any autonomous space mission, from orbiters to fly-bys to interstellar probes, Ono says.
"The combination of more powerful on-board computing power, pre-planned commands computed on high performance computers like those at TACC, and new algorithms has the potential to allow future rovers to travel much further and do more science."