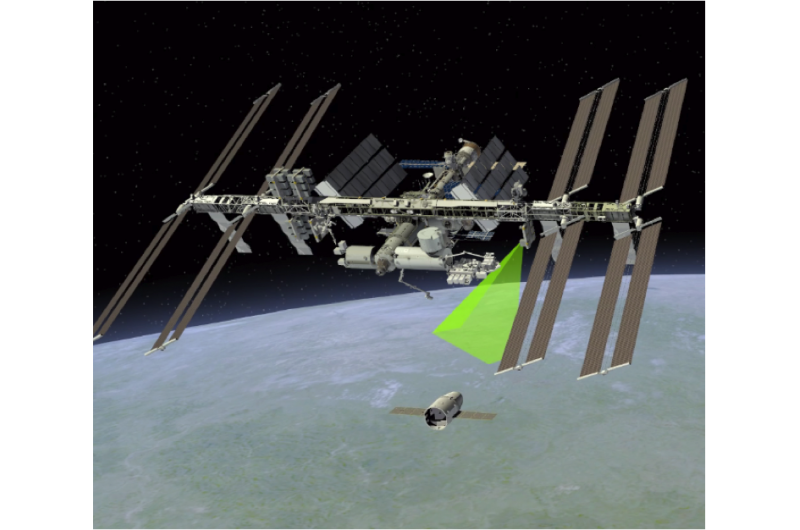
Représentation d'un artiste de Raven traquant un véhicule s'approchant de la Station spatiale internationale. Crédit :Goddard Space Flight Center de la NASA
Bientôt le lancement, à bord de la 10e mission commerciale de ravitaillement SpaceX, sera un module technologique appelé Raven, ce qui rapprochera la NASA d'une capacité de navigation relative. Lorsqu'il est apposé à l'extérieur de la Station spatiale internationale, Raven testera des technologies fondamentales qui permettront des rendez-vous autonomes dans l'espace, ce qui signifie qu'ils ne nécessiteront aucune implication humaine, même depuis le sol.
Pour comprendre pourquoi le rendez-vous autonome est important dans les missions spatiales, imaginez ce scénario :un vaisseau spatial suit un autre satellite, combler progressivement l'écart - chaque véhicule voyageant plus de 16, 000 miles par heure dans l'obscurité de l'espace. Le satellite en cours de maintenance, le client, est un engin de plusieurs tonnes qui manque de carburant. Le satellite de maintenance entièrement robotisé, le serveur, nommé Restore-L suit à sa poursuite, transportant un propulseur et des outils à longue durée de vie.
Le client, non conçu pour être entretenu, n'a pas de marquage pour permettre au réparateur de le trouver et de le sécuriser plus facilement. Le réparateur doit le faire lui-même, en utilisant un système de vision industrielle avancé, perfectionné à l'aide des données recueillies par Raven à bord de la station spatiale. La réussite de l'entretien dépend d'abord de la capacité de l'opérateur à localiser avec précision et à faire correspondre la vitesse avec le satellite client.
Pour compliquer davantage ce scénario, le serveur est loin de la Terre, créant un délai de communication pour l'échange de commandes et de données vers et depuis l'espace. Le retard empêche les opérateurs au sol de fournir rapidement et avec précision des commandes à l'agent de maintenance afin d'éviter une éventuelle collision dans les derniers mètres du rendez-vous.
Par conséquent, le servicer doit effectuer une navigation relative avec son client, et il doit le faire de manière autonome (par lui-même, sans guidage humain), et en temps réel.
"Le rendez-vous autonome de deux engins spatiaux est crucial pour de nombreuses futures missions de la NASA et Raven mûrit cette technologie jamais tentée auparavant, " dit Ben Reed, directeur de division adjoint, pour la division des projets d'entretien des satellites (SSPD) au Goddard Space Flight Center de la NASA à Greenbelt, Maryland—le bureau qui développe et gère cette mission de démonstration.
Raven démontrera la capacité d'un système de navigation relative révolutionnaire, logé dans son cadre de la taille d'un bagage à main, qui permettra à un serveur de vaisseau spatial de trouver, et si nécessaire, attraper sa cible. Raven vise à conduire à un développement complet, système mature disponible pour les futures missions de la NASA.

Module technologique Raven, pré lancement. Crédit :Centre de vol spatial Goddard de la NASA/Chris Gunn
Cinq jours après le lancement, Raven sera retiré du "tronc" non pressurisé du vaisseau spatial SpaceX Dragon par le bras robotique Dextre, et attaché sur une plate-forme de charge utile à l'extérieur de la station spatiale. De ce perchoir, Raven commencera à fournir des informations pour le développement d'un système mature de navigation relative en temps réel.
Lors de son séjour à bord de la station spatiale, Les composants de Raven uniront leurs forces pour imager et suivre indépendamment les engins spatiaux entrants et sortants de la station spatiale en visite. Pour faire ça, Les capteurs de Raven fourniront les données qu'ils « voient » à un processeur, qui exécutera des ensembles d'instructions (également appelés algorithmes de pose spéciaux) pour évaluer la distance relative entre Raven et le vaisseau spatial qu'il suit. Puis, sur la base de ces calculs, le processeur enverra de manière autonome des commandes qui font pivoter le module Raven sur son cardan, ou système de pointage, pour maintenir les capteurs entraînés sur le véhicule, tout en continuant à le suivre. Pendant que ces manœuvres ont lieu, Les opérateurs de la NASA sur le terrain évalueront comment les technologies de Raven fonctionnent ensemble en tant que système, et effectuera des ajustements pour augmenter les performances de suivi de Raven.
Over its two-year lifespan, Raven will test these critical technologies that are expected to support future NASA missions for decades to come. One upcoming application for this technology is its use in the Restore-L servicing mission which will navigate to refuel Landsat 7, a U.S. government Earth-observing satellite already in orbit. An additional application is the potential use for systems on NASA's Journey to Mars. Raven is on track to advance and mature the sensors, machine vision algorithms, and processing necessary to implement a robust autonomous rendezvous and docking system for NASA. SSPD is developing and managing both the Raven and Restore-L demonstration missions.