Crédit :Université d'État de Caroline du Nord
Une équipe de chercheurs en ingénierie a réalisé une avancée fondamentale dans le contrôle des robots dits mous, utiliser des champs magnétiques pour manipuler à distance des chaînes de microparticules intégrées dans des dispositifs robotiques souples. Les chercheurs ont déjà créé plusieurs appareils qui utilisent la nouvelle technique.
"En mettant ces chaînes auto-assemblantes dans des robots souples, nous pouvons leur faire exécuter des fonctions plus complexes tout en conservant des conceptions relativement simples, " dit Joe Tracy, professeur agrégé de science et d'ingénierie des matériaux à la North Carolina State University et auteur correspondant d'un article sur le travail. "Les applications possibles pour ces dispositifs vont des pompes déclenchées à distance pour l'administration de médicaments au développement de structures déployables à distance."
La nouvelle technique s'appuie sur des travaux antérieurs dans le domaine de l'auto-assemblage, composites actionnés magnétiquement par Tracy et Orlin Velev, le professeur INVISTA de génie chimique et biomoléculaire à NC State.
Pour cette étude, les chercheurs ont introduit des microparticules de fer dans un mélange polymère liquide, puis ont appliqué un champ magnétique pour induire les microparticules à former des chaînes parallèles. Le mélange est ensuite séché, laissant derrière lui un film mince de polymère élastique incrusté de chaînes alignées de particules magnétiques.
"Les chaînes nous permettent de manipuler le polymère à distance comme un robot doux en contrôlant un champ magnétique qui affecte les chaînes de particules magnétiques, " dit Tracy.
Spécifiquement, la direction du champ magnétique et sa force peuvent être modifiées. Les chaînes de microparticules de fer répondent en s'alignant avec le polymère environnant dans la même direction que le champ magnétique appliqué.
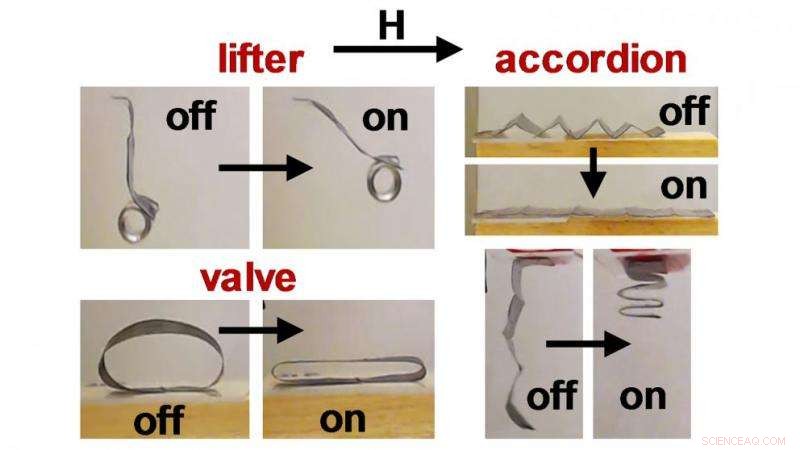
En utilisant cette technique, les chercheurs ont créé trois types de robots mous. Un appareil est un porte-à-faux qui peut soulever jusqu'à 50 fois son propre poids. Le deuxième appareil est une structure en accordéon qui se dilate et se contracte, imitant le comportement du muscle. Le troisième appareil est un tube conçu pour fonctionner comme une pompe péristaltique - une section comprimée parcourt la longueur du tube, un peu comme quelqu'un qui presse le dernier morceau de dentifrice en passant son doigt le long du tube.
« Nous travaillons maintenant à améliorer à la fois le contrôle et la puissance de ces appareils, faire progresser le potentiel de la robotique douce, " dit Tracy.
Les chercheurs ont également développé une métrique pour évaluer les performances des poussoirs magnétiques, comme le dispositif en porte-à-faux.
"Nous le faisons en mesurant la quantité de poids soulevée et en tenant compte à la fois de la masse de particules dans le lève-personne et de la force du champ magnétique appliqué, " dit Ben Evans, co-auteur de l'article et professeur agrégé de physique à l'Université Elon. "Nous pensons qu'il s'agit d'un outil utile pour les chercheurs dans ce domaine qui souhaitent trouver un moyen empirique de comparer les performances de différents appareils."