Les technologies étudiées dans le projet SeaClear sont testées dans le port de Hambourg, entre autres. Crédit :HPA
Quatre-vingt-six millions de tonnes de plastiques finissent dans les océans chaque année, avec des conséquences dévastatrices pour la vie marine, nature et, finalement, pour nous les humains. Les vastes plaques flottantes de plastique tapissant la surface de l'eau, certains aussi grands que des pays entiers, ne sont que la pointe de l'iceberg. Environ 90 pour cent de ces déchets finissent sur les fonds marins. Le Centre Fraunhofer de logistique et de services maritimes CML et un réseau international de partenaires veulent être les premiers à mettre de l'ordre dans ce gâchis avec un projet appelé SeaClear. Suit un entretien avec les chefs de projet Johannes Oeffner et Cosmin Delea.
Votre objectif est de collecter les déchets sur les fonds marins dans le cadre du projet SeaClear. Pourquoi?
Oeffner :La pollution marine est l'un des problèmes mondiaux les plus importants. Il affecte l'environnement, l'économie, Sécurité, santé et culture. Les plastiques ne se dégradent pas facilement, ils sont donc susceptibles de rester dans la mer pendant des centaines d'années. Considérant que les prévisions tablent sur un quadruplement de la production de plastique d'ici 2050, nous aurons un énorme problème si nous n'agissons pas. Selon le Forum économique mondial WEF, le ratio plastique/poisson en 2014 était de un pour cinq :d'ici 2050, il pourrait y avoir autant de déchets plastiques que de poissons.
De nombreuses approches pour écumer les débris plastiques de la surface des mers ont été proposées. Quelle est votre conception ?
Oeffner :Nous nous concentrons d'abord sur le nettoyage des fonds marins, surtout dans les zones côtières où la pollution est particulièrement forte. Dans le concept SeaClear, nous utilisons divers véhicules robotiques qui sont connectés les uns aux autres. Un ravitailleur autonome ou télécommandé (véhicule de surface sans pilote, USV) est pris en charge par deux robots sous-marins (véhicule télécommandé, ROV) et un véhicule aérien ou drone (véhicule aérien sans pilote, drone). Nous déployons le drone et un robot pour cartographier les déchets en surface et dans la colonne d'eau. Le deuxième ROV utilise ces informations et utilise une pince conçue sur mesure et un dispositif d'aspiration pour collecter les déchets cartographiés sur le fond marin et les jeter dans un bac collectif.

Grâce au projet SeaClear, la côte de Dubrovnik doit être libérée des déchets sous-marins à l'avenir. Crédit :DUNEA
Quelles technologies se cachent derrière tout cela ?
Delea :Nous utilisons des méthodes de contrôle multi-agents pour des robots hétérogènes afin de piloter de manière synchrone tous les véhicules autonomes. Cela signifie que le changement de position d'un robot est reconnu par les autres robots. Chaque robot a la capacité intégrée de s'adapter à ces changements sans intervention humaine. Bien que nous émettions une commande, il s'adresse spécifiquement à un robot, tandis que les autres robots remarqueront le changement de pose et réagiront si nécessaire. Nous utilisons des algorithmes de deep learning pour détecter et distinguer les déchets de la faune et de la flore marines. Spécifiquement, nous combinons différents systèmes sensoriels tels que des caméras conventionnelles et multispectrales ou des capteurs acoustiques pour obtenir des données pertinentes sur les eaux et, après plusieurs sessions de formation, pour détecter et classer en ligne les déchets marins.
Comment formez-vous les robots autonomes ?
Delea :La détection et la classification nécessitent un entraînement intensif. Les premières étapes pour les deux consistent à utiliser des informations provenant de sources accessibles au public, telles que de grandes bases de données en ligne qui fournissent des images de la vie marine. Ensuite, nous effectuons un entraînement supplémentaire avec des cibles factices. Avant les dernières démonstrations, des essais préliminaires sont organisés pour évaluer leurs performances.
Les zones côtières sont très différentes. Où se déroulent ces procès ?
Oeffner :Nous testons actuellement les technologies dans deux scénarios différents à deux endroits à des profondeurs de 20 à 30 mètres. Nous voulons démontrer le processus pendant que les opérations portuaires sont en cours avec l'infrastructure existante et les procédures fixes dans le port de Hambourg. C'est pourquoi ce scénario se concentre sur la zone industrielle du port. Le scénario côtier à Dubrovnik, Croatie, s'adresse au secteur du tourisme et vise spécifiquement à nettoyer les eaux des points chauds touristiques. Les premiers essais ont eu lieu sur les deux sites au printemps. D'autres tests sont prévus pour Dubrovnik à la fin de l'été après la suspension des essais en raison de la couronne.
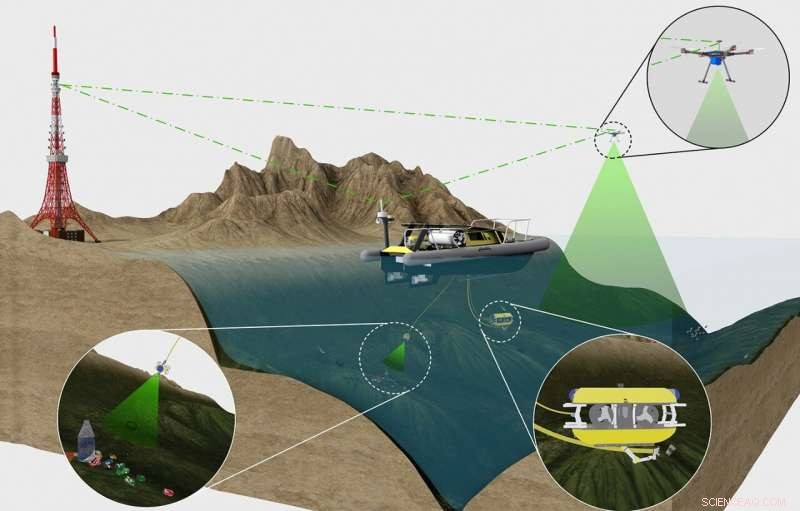
Divers véhicules robots sont interconnectés dans le système SeaClear. Un vaisseau mère (UPS) autonome ou télécommandé en surface est soutenu par deux robots sous-marins (ROV) et un drone de vol (UAV). Crédit :TUM
Quels sont les plus grands défis de ce projet ?
Delea :Les défis sur les deux sites d'essai sont différents :les eaux de Hambourg sont très difficiles à analyser en raison de leur turbidité et de la faible visibilité. De plus, actuellement, il n'existe pas de statistiques claires sur le type et la quantité de déchets sous-marins dans la zone portuaire. C'est là que nous voulons développer davantage la robustesse et les caractéristiques individuelles du système SeaClear et le préparer pour le marché. À cette fin, nous avons fait participer des parties prenantes du port de Hambourg pour examiner SeaClear comme un futur service portuaire. La grande difficulté à Dubrovnik est que l'accès du public ne peut pas être restreint. D'autre part, cela signifie qu'un certain nombre de mesures de sécurité supplémentaires seront nécessaires, qui devra être prise lorsque le système sera testé sur site. Mais la visibilité dans ces eaux est proche de l'idéal, l'objectif principal est donc de valider l'ensemble du système et de montrer son ensemble complet de fonctionnalités.
Comment abordez-vous ces problèmes ?
Delea :A Hambourg, nous essayons de fusionner les données de différents capteurs lors de la cartographie des déchets marins afin d'évaluer quel type de déchets sous-marins se trouve dans ces eaux. Nous utilisons principalement des capteurs acoustiques en raison de la visibilité limitée. A Dubrovnik, nous allons installer des mécanismes de sécurité supplémentaires sur le drone volant, avec l'aide des capteurs du vaisseau-mère. L'objectif ici est de minimiser les problèmes de sécurité et d'éviter les collisions.
Et comment allez-vous vous assurer que les écosystèmes fragiles comme les récifs coralliens ne soient pas endommagés ?
Delea :Ce problème n'est pas présent à Hambourg, tandis que le site d'essai croate compte également peu de récifs coralliens. Mais lorsque le système SeaClear final sera déployé, il utilisera des capteurs optiques et de l'IA pour distinguer les récifs coralliens, éviter les procédures difficiles/dangereuses pour ramasser uniquement les déchets.
Quelle partie du projet relève de la responsabilité du Fraunhofer CML et qui sont les autres partenaires de cette entreprise ?
Oeffner :CML est le coordinateur technique du projet et est responsable de l'intégration du système global ainsi que de la conception et du développement du panier sous-marin pour contenir les déchets collectés. Quoi de plus, nous développons un centre de surveillance virtuel qui envoie des commandes aux robots et diffuse leurs données. Le projet comprend également la mise en place du réseau de communication et de l'infrastructure serveur nécessaire pour fournir les services SeaClear aux différents clients via des interfaces web. Le consortium est composé des universités techniques de Munich, Delft, Dubrovnik et Cluj-Napoca ainsi que SubSea Tech Marseille, l'Autorité portuaire de Hambourg et l'Agence de développement régional DUNEA Dubrovnik. L'objectif est que ces deux dernières organisations exploitent et utilisent également le système développé une fois le projet terminé.