L'intelligence artificielle guide l'exploration rapide des habitats sous-marins basée sur les données

AE2000f est l'éclaireur de l'expédition, il nagera à environ 20km/h et collectera des images préliminaires du fond marin, afin de déterminer où le reste des robots devrait se concentrer. Crédit :Schmidt Ocean Institute
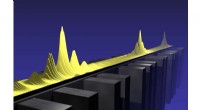
Les chercheurs à bord du navire de recherche du Schmidt Ocean Institute Falkor ont utilisé des robots sous-marins autonomes, ainsi que le véhicule télécommandé (ROV) de l'Institut SuBastian, pour acquérir 1,3 million d'images haute résolution du fond marin à Hydrate Ridge, en les composant dans le plus grand modèle 3D couleur haute résolution connu du fond marin. En utilisant des algorithmes de clustering non supervisés, ils ont identifié des points chauds biologiques dynamiques dans les données d'image pour des enquêtes et un échantillonnage plus détaillés par un véhicule télécommandé.
Une expédition récente dirigée par le Dr Blair Thornton, titulaire de chaires agrégées à la fois à l'Université de Southampton et à l'Institut des sciences industrielles, l'Université de Tokyo, a démontré comment l'utilisation de la robotique autonome et de l'intelligence artificielle en mer peut accélérer considérablement l'exploration et l'étude des écosystèmes des grands fonds difficiles à atteindre, comme des suintements de méthane actifs par intermittence. Grâce à une analyse rapide des données à haut débit en mer, il a été possible d'identifier des points chauds biologiques dans la région de Hydrate Ridge au large des côtes de l'Oregon, assez rapidement pour les sonder et les échantillonner, dans les jours qui suivent le relevé d'imagerie des véhicules sous-marins autonomes (AUV). L'équipe à bord du navire de recherche Falkor utilisé une forme d'intelligence artificielle, regroupement non supervisé, pour analyser les images du fond marin acquises par l'AUV et identifier les zones cibles pour des levés photogrammétriques AUV plus détaillés et un échantillonnage interactif ciblé de points chauds avec le ROV SuBastian.
Ce projet a démontré comment la science des données moderne peut augmenter considérablement l'efficacité de la recherche conventionnelle en mer, et améliorez la productivité de l'exploration interactive des fonds marins avec le mode trop familier « trébucher dans le noir ». "Développer des workflows opérationnels totalement nouveaux est risqué, cependant, il est très pertinent pour des applications telles que la surveillance des fonds marins, étude de l'écosystème et planification de l'installation et du déclassement des infrastructures du fond marin, " dit Thornton.
L'idée derrière cette mission de robotique adaptative n'était pas de bouleverser la structure de la façon dont les choses sont faites en mer, mais simplement pour supprimer les goulots d'étranglement dans les flux d'informations et de traitement des données à l'aide de méthodes de calcul et d'intelligence artificielle. Les algorithmes utilisés sont capables de produire rapidement des résumés simples d'observations, et former des plans de déploiement ultérieurs. Par ici, les scientifiques peuvent réagir aux changements dynamiques de l'environnement et des zones cibles qui conduiront à la plus grande opération, scientifique, ou des gains de gestion environnementale.