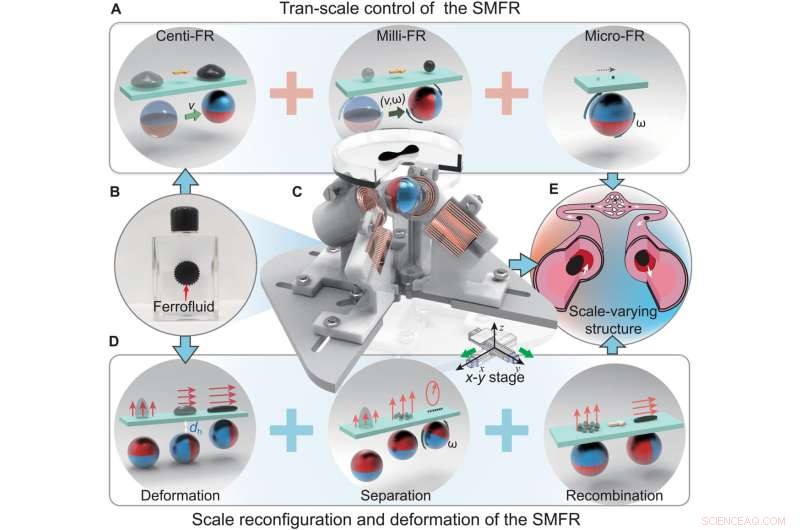
Vue d'ensemble des stratégies de manœuvre trans-échelle et de reconfiguration d'échelle des robots ferrofluidiques miniatures reconfigurables à l'échelle (SMFR). (A) Contrôle trans-échelle du SMFR :locomotion du centi-FR, milli-FR et micro-FR basé sur le gradient magnétique, à la fois le gradient magnétique et le couple, et le couple magnétique uniquement, respectivement. (B) Comportements de réponse des gouttelettes de ferrofluide dans les champs magnétiques. (C) Le SMFR est manipulé par un système d'actionnement magnétique conçu sur mesure (le système M3RA) composé de quatre électroaimants, un aimant permanent sphérique (SPM) et une étape de traduction motorisée. Pour observer facilement la composition interne du système, nous cachons un quart de la structure. (D) Déformation et reconfiguration à l'échelle du SMFR :déformation par étirement, réduction d'échelle par séparation et mise à l'échelle par recombinaison. La flèche rouge représente la direction de polarisation du champ magnétique. (E) Scénario d'application typique du SMFR basé sur la combinaison des capacités ci-dessus :locomotion dans un espace fortement variable tel que le réseau vasculaire. Crédit :Progrès scientifiques (2022). DOI :10.1126/sciadv.abq1677
Une équipe de chercheurs de l'Université de Soochow, en collaboration avec deux collègues de l'Institut Max Planck pour les systèmes intelligents et un autre de l'Institut de technologie de Harbin, a développé un type de robot mou qui peut être divisé en composants plus petits pour traverser de petits espaces puis se réassembler. Dans leur article publié dans la revue Science Advances , le groupe décrit comment ils ont fabriqué leurs minuscules robots et suggèrent des utilisations possibles pour eux.
Alors que la science de la robotique continue de mûrir, les ingénieurs du monde entier continuent de trouver de nouvelles façons de les fabriquer. Dans ce nouvel effort, les chercheurs ont fabriqué le leur à partir d'un ferrofluide (nanoparticules d'oxyde de fer magnétique) qu'ils ont mis en suspension dans une huile claire. Le robot est contrôlé à l'aide d'aimants externes.
L'utilisation d'un robot fait d'un matériau qui n'est que très lâche, notent les chercheurs, permet de modifier sa forme à la demande. En appliquant plusieurs champs magnétiques, ils ont montré qu'il était possible de diriger leur robot à travers un labyrinthe, en changeant parfois de forme pour franchir des obstacles. Ils l'ont forcé à s'allonger, par exemple, pour se faufiler dans un passage étroit. Ils l'ont également cassé en un nombre souhaité de parties plus petites pour passer à travers un matériau poreux. Dans les deux cas, le robot a ensuite été facilement réassemblé en une seule forme de robot rond et a poursuivi son voyage. Ils notent qu'un tel robot pourrait être fabriqué dans une grande variété de tailles.
Le robot pourrait éventuellement être utilisé dans des applications médicales comme moyen de transporter des médicaments vers des parties du corps difficiles d'accès, telles que des ganglions pulmonaires ou des parties du cerveau. Les chercheurs reconnaissent que pour des applications pratiques, la conception devrait surmonter de nombreux obstacles, le plus évident étant le développement d'un système de contrôle magnétique capable de pénétrer avec précision dans les os tels que le crâne. Entre-temps, d'autres ont noté qu'un tel système robotique pourrait s'avérer utile dans les dispositifs de laboratoire sur puce où des processus chimiques sont effectués pour des tâches telles que la détection de virus. Les minuscules nouveaux robots pourraient peut-être être utilisés pour transporter les produits chimiques nécessaires aux réactions.
© 2022 Réseau Science X Slime magnétique reconfigurable à la volée utilisé comme robot














