Le robot présente la pièce dans une position ergonomique pour permettre une inspection facile. Crédit :Fraunhofer HHI
Les robots sont déployés dans de plus en plus de situations, dont beaucoup impliquent une collaboration entre les humains et les robots, par exemple en soulageant les humains de tâches onéreuses sur le lieu de travail. Les défis sont de savoir comment intégrer le robot dans l'environnement de travail et comment le faire fonctionner. Dans un projet commun avec Volkswagen AG l'Institut Fraunhofer pour les télécommunications, Institut Heinrich Hertz, HHI, démontrera les avantages que l'utilisation de la collaboration homme-robot (HRC) peut apporter à l'inspection des cordons de soudure dans l'industrie automobile.
Des cordons de soudure impeccables sont un critère de qualité essentiel dans l'ingénierie automobile. À l'avenir, les soudures seront inspectées par une équipe homme-robot, chacun apportant ses compétences et son expertise spécifiques. Contrôlé par des commandes gestuelles et vocales, le robot maintiendra et manœuvrera les composants spécifiques en position, tandis que l'employé marque et enregistre tout défaut de qualité de la soudure.
Le projet de recherche conjoint EASY COHMO (Ergonomics Assistance Systems for Contactless Human-Machine-Operation) s'appuie sur les nombreuses années d'expérience que Fraunhofer HHI a accumulées dans les domaines de la capture 3D, Traitement de l'information 3D et visualisation 3D. Ce système d'inspection visuelle des cordons de soudure sur les composants clés de la production automobile offre un excellent exemple de la façon dont le HRC peut fonctionner dans l'industrie. Dans les années à venir, cette technologie apportera une aide concrète aux procédures d'inspection chez Volkswagen.
De l'inspection manuelle aux normes de l'Industrie 4.0
Le processus d'inspection est resté inchangé pendant des décennies. Tout d'abord, chaque composant doit être fixé manuellement dans un positionneur rotatif afin de pouvoir être inspecté sous tous les angles. Inévitablement, cela implique que l'employé doive assumer des positions non ergonomiques, ce qui peut entraîner des microtraumatismes répétés. Par ailleurs, peu de temps est réservé à cette procédure complexe, ce qui peut avoir un impact négatif sur la qualité de l'inspection.

Une interface utilisateur basée sur les gestes de la main augmentée est projetée sur le composant et l'établi, où il sert à contrôler le robot et la procédure d'inspection. Crédit :Fraunhofer HHI
Maintenant, les employés sont libres d'effectuer l'inspection à leur manière. Il en résulte inévitablement une procédure non standardisée qui rend plus difficile la reconnaissance des défauts systématiques sur la base des observations des différents inspecteurs. En outre, de tels défauts ne sont souvent pas enregistrés ou doivent être laborieusement entrés dans un système séparé via un clavier et une souris.
À l'avenir, ce processus d'inspection sera interactif, avec des robots utilisés pour maintenir les composants lourds et les déplacer dans une position dans laquelle les employés peuvent les inspecter de manière ergonomique. De tels robots auront au moins six axes et pourront donc se déplacer, tourner et incliner un composant dans toutes les directions possibles. Le robot retirera automatiquement un composant de la ligne et le présentera pour inspection. L'employé va interagir avec le robot au moyen de gestes explicites et implicites, orientant ainsi le composant dans la position souhaitée. Les employés peuvent concentrer leur attention sur l'identification des défauts et, par conséquent, négligera moins de défauts.
Contrôle multimodal
Le middleware développé par Fraunhofer HHI coordonne les différents capteurs qui servent à capturer la situation de travail globale. En fonction de la position et des gestes de l'employé, le logiciel calcule le mouvement requis du bras robotique. Cela garantit également la sécurité de l'utilisateur. Par exemple, chaque fois que l'employé cesse de regarder directement le composant, le logiciel arrête le bras robotique par précaution.
"Le robot peut également être paramétré pour répondre à des instructions personnalisées, " explique Paul Chojecki, chef de projet chez Fraunhofer HHI. « Notre nouvelle interface perceptive est capable de traiter les gestes individuels et les commandes vocales d'un utilisateur. Cela signifie que le système peut être rapidement personnalisé en fonction des exigences spécifiques d'un poste de travail.
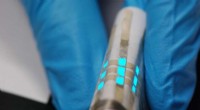
Les gestes sont utilisés pour marquer, catégoriser et confirmer les défauts sur le composant. Au moyen d'un suivi précis des objets et d'une augmentation basée sur un projecteur, les employés disposent d'une interface directement sur le composant, dans leur espace de travail. Cela offre un moyen efficace et intuitif de générer un enregistrement numérique en 3D de tous les défauts des cordons de soudure. Par contre, la procédure d'inspection actuelle ne contient aucun enregistrement systématique des défauts, car il y a très peu d'échanges formalisés d'informations entre les différents salariés. Avec la nouvelle procédure, tous les défauts peuvent être immédiatement entrés dans le système, puis évalués statistiquement. Cela signifie que les défauts systématiques sont identifiés plus rapidement et peuvent ainsi être éliminés au stade du soudage.

La position des défauts de cordon de soudure identifiés par l'utilisateur peut être déterminée par une combinaison de suivi des doigts et de suivi de cordon 3D, et précisément documenté. Crédit :Fraunhofer HHI
Extensible à tous les postes de travail homme-robot
Le système comprend un grand nombre de capteurs combinés à des commandes multimodales basées sur un middleware amélioré ainsi que des instructions d'utilisation personnalisées et un apprentissage automatique. C'est une approche qui pourrait bien apporter une percée pour d'autres applications HRC, et également élargir la portée de la collaboration et de l'interaction entre les humains et les robots. D'autres domaines d'utilisation incluent les fraiseuses, par exemple, ou des assistants robotiques interactifs dans des environnements non industriels, par exemple, dans les secteurs de la santé ou des services.