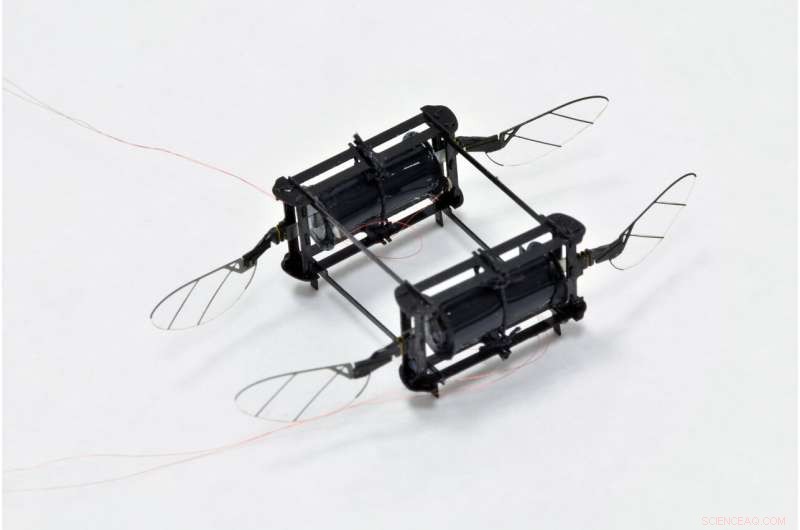
Un quadrilatère, le modèle à deux actionneurs pourrait voler dans un environnement encombré, surmonter plusieurs collisions en un seul vol. Crédit :Laboratoire de microrobotique de Harvard
La vue d'un RoboBee fonçant vers un mur ou s'écrasant dans une boîte en verre a peut-être déjà déclenché la panique chez les chercheurs du Harvard Microrobotics Laboratory de la Harvard John A. Paulson School of Engineering and Applied Science (SEAS), mais pas plus.
Des chercheurs de SEAS et du Wyss Institute for Biologically Inspired Engineering ont développé un RoboBee résistant alimenté par des muscles artificiels mous qui peuvent s'écraser contre les murs, tomber sur le sol, et entrer en collision avec d'autres RoboBees sans être endommagé. C'est le premier microrobot propulsé par des actionneurs souples pour réaliser un vol contrôlé.
"Il y a eu une grande poussée dans le domaine de la microrobotique pour fabriquer des robots mobiles à partir d'actionneurs souples parce qu'ils sont si résistants, " dit Yufeng Chen, un ancien étudiant diplômé et boursier postdoctoral à SEAS et premier auteur de l'article. "Toutefois, de nombreuses personnes sur le terrain étaient sceptiques quant à leur utilisation pour des robots volants, car la densité de puissance de ces actionneurs n'était tout simplement pas assez élevée et ils sont notoirement difficiles à contrôler. Notre actionneur a une densité de puissance et une contrôlabilité suffisamment élevées pour réaliser un vol stationnaire."
La recherche est publiée dans La nature .
Pour résoudre le problème de densité de puissance, les chercheurs se sont appuyés sur les actionneurs souples à commande électrique développés dans le laboratoire de David Clarke, le professeur de matériaux de la famille élargie Tarr. Ces actionneurs souples sont fabriqués à partir d'élastomères diélectriques, matériaux souples avec de bonnes propriétés isolantes, qui se déforment lorsqu'un champ électrique est appliqué.