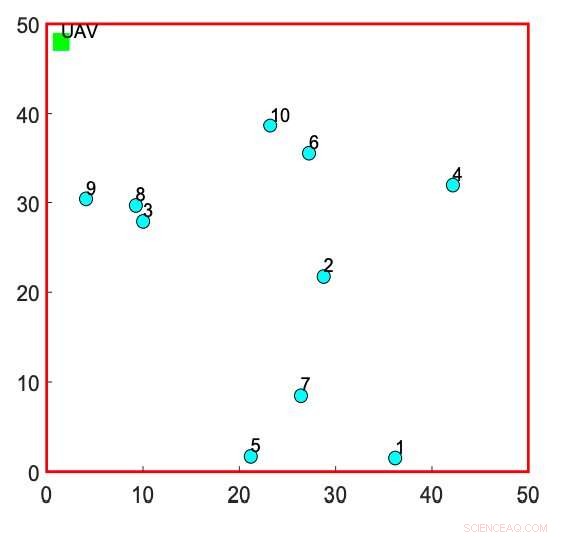
Image représentant un système de coordonnées cartésiennes à deux dimensions, où le drone est situé à la station au sol et les GU sont situées dans la zone considérée. Crédit :Tran et al.
Une équipe de chercheurs de l'Université du Luxembourg et de l'Ontario Tech University ont récemment proposé une nouvelle approche pour concevoir des trajectoires pour les communications sans fil utilisant des véhicules aériens sans pilote (UAV) écoénergétiques. Leur papier, prépublié sur arXiv, se concentre spécifiquement sur les cas dans lesquels un UAV agit comme une station de base volante (BS) pour servir les utilisateurs au sol (GS) dans certaines contraintes de latence prédéterminées.
"Notre objectif est de concevoir la trajectoire du drone pour minimiser la consommation totale d'énergie tout en satisfaisant les exigences RT et le budget énergétique, ce qui est accompli en optimisant conjointement la trajectoire et les vitesses de l'UAV le long des sauts suivants, ", ont écrit les chercheurs dans leur article.
L'optimisation de la trajectoire d'un drone et de ses vitesses ensemble peut être quelque peu difficile à réaliser. Faire cela, les chercheurs ont développé une approche qui réalise deux étapes consécutives.
Leur approche implique l'utilisation de deux algorithmes distincts, une recherche heuristique et un algorithme de programmation dynamique (DP). Les méthodes de recherche heuristique fonctionnent en évaluant toutes les informations disponibles à chaque étape et en décidant du chemin à suivre en classant les options disponibles.
Programmation dynamique, d'autre part, est une approche pour résoudre des problèmes avec des "sous-problèmes" qui se chevauchent. afin de les réutiliser si le même sous-problème est rencontré à l'avenir.
Les chercheurs ont utilisé leurs algorithmes de recherche heuristique et de programmation dynamique pour atteindre un ensemble réalisable de trajectoires pour les drones qui ne violent pas les contraintes de latence de l'utilisateur au sol. La tâche de trouver ces trajectoires est résolue comme s'il s'agissait d'un problème dit de voyageur de commerce avec fenêtres temporelles (TSPTW). TSPTW est un problème algorithmique utilisé en informatique qui consiste à trouver un chemin à coût minimum pour un vendeur qui souhaite voyager et visiter chacune d'un ensemble de villes exactement une fois dans une fenêtre de temps spécifique.
Les trajectoires suggérées par les algorithmes ont ensuite été comparées à celles obtenues en utilisant des techniques de recherche exhaustive et en abordant la tâche comme le problème du voyageur de commerce (TSP); un problème algorithmique dans lequel il faut trouver les itinéraires optimaux pour un vendeur qui souhaite visiter un ensemble spécifique de villes sans aucune exigence de temps spécifique.
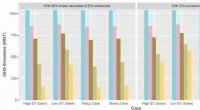
"Alors que l'algorithme exhaustif atteint les meilleures performances à un coût de calcul élevé, l'algorithme heuristique présente de moins bonnes performances avec une faible complexité, " les chercheurs ont expliqué dans leur article. " En conséquence, le DP est proposé comme un compromis pratique entre les algorithmes exhaustifs et heuristiques."
En plus des deux algorithmes pour trouver des trajectoires optimales de drones, les chercheurs ont également proposé une technique de minimisation de l'énergie. Cette méthode fonctionne en optimisant conjointement les vitesses de l'UAV et les sauts ultérieurs.
Lorsque les chercheurs ont évalué leurs algorithmes, ils ont constaté qu'ils étaient très efficaces, surpassant les techniques de pointe existantes tant en termes de consommation d'énergie que de performances de coupure. À l'avenir, la nouvelle approche qu'ils ont proposée pourrait aider à concevoir de meilleures trajectoires pour la minimisation de l'énergie dans les applications impliquant des communications sans fil activées par UAV avec des contraintes de latence. En outre, leurs travaux pourraient ouvrir la voie à de futures études visant à développer de nouveaux outils pour améliorer les performances des réseaux de communication UAV.
© 2019 Réseau Science X