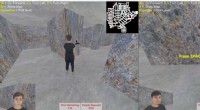
Des chercheurs du MIT ont développé un modèle de planification de trajectoire qui aide les drones à voler de manière plus sûre à grande vitesse dans des zones auparavant inexplorées, ce qui pourrait aider les missions de recherche et de sauvetage à travers les forêts denses. Crédit : Institut de technologie du Massachusetts
Les drones autonomes sont prudents lorsqu'ils naviguent dans l'inconnu. Ils avancent, cartographier fréquemment des zones inconnues avant de continuer de peur qu'elles ne s'écrasent sur des objets non détectés. Mais ce ralentissement n'est pas idéal pour les drones effectuant des tâches urgentes, telles que des missions de recherche et de sauvetage à travers des forêts denses.
Maintenant, les chercheurs du MIT ont développé un modèle de planification de trajectoire qui aide les drones à voler à grande vitesse dans des zones auparavant inexplorées, tout en restant en sécurité.
Le modèle - bien nommé " PLUS RAPIDE " - estime le chemin le plus rapide possible d'un point de départ à un point de destination à travers toutes les zones que le drone peut et ne peut pas voir, sans aucun souci de sécurité. Mais, pendant que le drone vole, le modèle enregistre en permanence des trajectoires de "sauvegarde" sans collision qui s'écartent légèrement de cette trajectoire de vol rapide. Lorsque le drone n'est pas sûr d'une zone particulière, il fait un détour par le chemin de secours et réachemine son chemin. Le drone peut ainsi naviguer à grande vitesse sur la trajectoire la plus rapide tout en ralentissant parfois légèrement pour assurer la sécurité.
"Nous voulons toujours exécuter le chemin le plus rapide, mais nous ne savons pas toujours que c'est sûr. Si, alors que nous avançons sur ce chemin le plus rapide, nous découvrons qu'il y a un problème, nous devons avoir un plan de sauvegarde, " dit Jésus Tordesillas, un étudiant diplômé du Département d'aéronautique et d'astronautique (AeroAstro) et premier auteur d'un article décrivant le modèle présenté lors de la conférence internationale du mois prochain sur les robots et systèmes intelligents. "Nous obtenons une trajectoire à vitesse plus élevée qui peut ne pas être sûre et une trajectoire à vitesse lente qui est complètement sûre. Les deux chemins sont cousus ensemble au début, mais alors l'un s'écarte pour la performance et l'autre pour la sécurité."
Dans les simulations forestières, où un drone virtuel navigue autour de cylindres représentant des arbres, Les drones propulsés PLUS RAPIDEMENT ont effectué en toute sécurité des trajectoires de vol environ deux fois plus rapidement que les modèles traditionnels. Dans des tests réels, Des drones plus rapides manoeuvrant autour de boîtes en carton dans une grande pièce ont atteint des vitesses de 7,8 mètres par seconde. Cela repousse les limites de la vitesse à laquelle les drones peuvent voler, en fonction du poids et des temps de réaction, disent les chercheurs.
"C'est à peu près aussi vite que vous pouvez aller, " déclare le co-auteur Jonathan How, le professeur Richard Cockburn Maclaurin d'aéronautique et d'astronautique. « Si vous vous trouviez dans une pièce avec un drone volant à sept à huit mètres par seconde, vous prendriez probablement du recul."
L'autre co-auteur de l'article est Brett T. Lopez, un ancien Ph.D. étudiant à AeroAstro et maintenant post-doctorant au Jet Propulsion Laboratory de la NASA.
Diviser les chemins
Les drones utilisent des caméras pour capturer l'environnement sous forme de voxels, Cubes 3D générés à partir des informations de profondeur. Pendant que le drone vole, chaque voxel détecté est étiqueté comme "espace libre connu, " inoccupé par les objets, et « espace connu occupé, " qui contient des objets. Le reste de l'environnement est "l'espace inconnu".
FASTER utilise tous ces domaines pour planifier trois types de trajectoires :« l'ensemble, " "en sécurité, " et "engagé". La trajectoire entière est le chemin entier du point de départ A à l'emplacement de but B, à travers des zones connues et inconnues. Faire cela, "décomposition convexe, " une technique qui décompose des modèles complexes en composants discrets, génère des polyèdres superposés qui modélisent ces trois zones dans un environnement. En utilisant quelques techniques géométriques et contraintes mathématiques, le modèle utilise ces polyèdres pour calculer une trajectoire globale optimale.
Simultanément, le modèle prévoit une trajectoire sûre. Quelque part sur toute la trajectoire, il trace un point de "sauvetage" qui indique le dernier moment où un drone peut faire un détour vers un espace libre connu non obstrué, en fonction de sa vitesse et d'autres facteurs. Pour trouver une destination sûre, il calcule de nouveaux polyèdres qui couvrent l'espace libre connu. Puis, il localise une tache à l'intérieur de ces nouveaux polyèdres. Essentiellement, le drone s'arrête dans un endroit sûr mais aussi proche que possible d'un espace inconnu, permettant un détour très rapide et efficace.
Trajectoire engagée
La trajectoire engagée est constituée du premier intervalle de toute la trajectoire, ainsi que toute la trajectoire de sécurité. Mais ce premier intervalle est indépendant de la trajectoire de sécurité, et par conséquent il n'est pas affecté par le freinage nécessaire pour la trajectoire sûre.
Le drone calcule une trajectoire entière à la fois, tout en gardant toujours une trace de la trajectoire sûre. Mais il y a une limite de temps :quand il atteint le point de sauvetage, il doit avoir réussi à calculer la prochaine trajectoire entière à travers l'espace connu ou inconnu. Si c'est le cas, il continuera à suivre toute la trajectoire. Autrement, il dévie vers la trajectoire sûre. Cette approche permet au drone de maintenir des vitesses élevées le long des trajectoires engagées, ce qui est essentiel pour atteindre des vitesses globales élevées.
Pour cela à tout travail, les chercheurs ont conçu des moyens pour que les drones traitent très rapidement toutes les données de planification, ce qui était difficile. Parce que les cartes sont si variées, par exemple, le délai imparti à chaque trajectoire engagée variait initialement de façon spectaculaire. Cela coûtait cher en calcul et ralentissait la planification du drone, les chercheurs ont donc développé une méthode pour calculer rapidement des temps fixes pour tous les intervalles le long des trajectoires, ce qui a simplifié les calculs. Les chercheurs ont également conçu des méthodes pour réduire le nombre de polyèdres que le drone doit traiter pour cartographier son environnement. Ces deux méthodes ont considérablement augmenté les délais de planification.
"Comment augmenter la vitesse de vol et maintenir la sécurité est l'un des problèmes les plus difficiles pour la planification du mouvement du drone, " dit Sikang Liu, un ingénieur logiciel chez Waymo, anciennement le projet de voiture autonome de Google, et un expert en algorithmes de planification de trajectoire. "Ce travail a montré une excellente solution à ce problème en améliorant le cadre de génération de trajectoire existant. Dans le pipeline d'optimisation de trajectoire, l'attribution du temps est toujours un problème délicat qui pourrait conduire à un problème de convergence et à un comportement indésirable. Cet article a abordé ce problème à travers une nouvelle approche… qui pourrait être une contribution perspicace dans ce domaine. »
Les chercheurs construisent actuellement de plus gros drones plus rapides avec des hélices conçues pour permettre un vol horizontal stable. Traditionnellement, les drones devront rouler et tanguer pendant qu'ils volent. Mais ce drone personnalisé resterait complètement plat pour diverses applications.
Une application potentielle pour FASTER, qui a été développé avec le soutien du département américain de la Défense, pourrait améliorer les missions de recherche et de sauvetage en milieu forestier, qui présentent de nombreux défis de planification et de navigation pour les drones autonomes. "Mais la zone inconnue n'a pas à être la forêt, " Comment dit. " Cela pourrait être n'importe quel domaine où vous ne savez pas ce qui s'en vient, et la rapidité avec laquelle vous acquérez ces connaissances est importante. La principale motivation est de construire des drones plus agiles."
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.