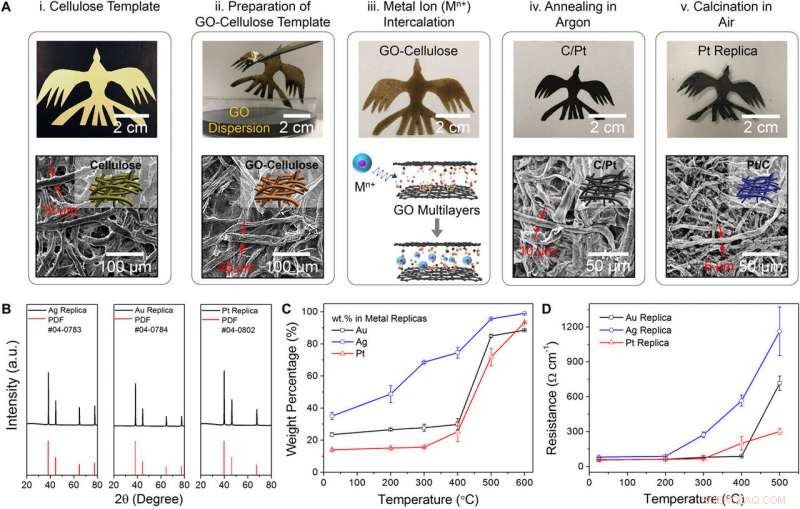
Synthèse de modèles compatible GO de répliques en métal noble.(A) La synthèse de modèles compatible GO pour transformer le papier de cellulose en répliques en métal noble. La synthèse d'une réplique de Pt en forme de phénix est démontrée. Les images SEM ont montré que les morphologies du réseau du papier cellulosique et du modèle GO-cellulose étaient très similaires. Le diamètre des microfibres a diminué de ~20 à ~6 m après un recuit/calcination en deux étapes. (B) Spectres XRD (diffraction des rayons X) de répliques métalliques telles que synthétisées après un recuit/calcination en deux étapes. Les spectres étaient cohérents avec leurs "fichiers de diffraction de poudre (PDF)" correspondants du "comité conjoint sur les normes de diffraction de poudre". (C) Pourcentages en poids de contenu métallique dans les répliques calibrées après la calcination dans l'air à différentes températures. Les pourcentages massiques sont déterminés par analyse EDS (Energy Dispersive X-ray Spectroscopy). (D) Résistance des répliques métalliques calibrées (sur 1 cm) après la calcination dans l'air à différentes températures. Les barres d'erreur indiquent les différences de mesures à partir de quatre échantillons. Crédit :Avancées scientifiques, doi:10.1126/scirobotics.aax7020.
Les robots origami peuvent être formés en intégrant étroitement de multiples fonctions d'actionnement, détection et communication. Mais la tâche est difficile car les matériaux conventionnels, notamment les plastiques et le papier, utilisés pour de telles conceptions robotiques imposent des contraintes pour limiter les fonctionnalités supplémentaires. Pour installer des multifonctionnalités dans le système, les scientifiques doivent généralement inclure une électronique externe qui augmente le poids du robot. Dans une étude récente maintenant publiée sur Robotique scientifique , Haitao Yang et ses collègues des départements interdisciplinaires de génie chimique et biomoléculaire, Le génie biomédical et le génie électrique et informatique aux États-Unis et à Singapour ont développé un processus de synthèse de modèles à l'oxyde de graphène (GO) pour produire des modèles reconfigurables, backbones métalliques conformes et multifonctionnels. Les épines dorsales ont constitué la base des robots origami couplés à des capacités de détection de contrainte et de communication sans fil intégrées. En utilisant la méthode GO, les chercheurs ont formé des origamis complexes en métal noble en tant que réplications structurelles de gabarits en papier.
L'équipe de recherche a pu reproduire des structures d'origami en platine rendues stables avec des élastomères minces pour former des épines dorsales multifonctionnelles afin de créer les nouveaux robots origami. Les nouveaux robots étaient plus déformables, ignifuges et écoénergétiques que ceux construits avec d'autres matériaux. Yang et al. des capacités supplémentaires observées pour les nouveaux robots platine (robots Pt), y compris le chauffage résistif à la demande, détection de contrainte et antennes intégrées sans électronique externe. Pour des capacités supplémentaires, ils comprenaient la surveillance ou l'enregistrement des mouvements robotiques en temps réel, communication sans fil entre robots, régulation thermique et contrôle magnétique. Le nouveau travail a enrichi la bibliothèque de matériaux robotiques pour concevoir des robots souples polyvalents.
Des chercheurs en robotique avaient déjà exploré l'art ancien japonais de l'origami pour concevoir des muscles artificiels, plieuses automatiques, systèmes d'origami printanier et métamorphose robotique. Classiquement, ils ont utilisé du papier cellulosique, polyester, polyétheréthercétone et polytétrafluoroéthylène pour fabriquer des squelettes pour de telles inventions. Malgré le support mécanique proposé, les épines dorsales en papier ou en plastique manquaient de fonctionnalités de réactivité aux stimuli, détection et communication sans fil. Au lieu d'installer des équipements externes pour fournir de telles fonctionnalités, les équipes de recherche visent désormais à développer des backbones robotiques souples multifonctionnels pour une intégration étroite. Les efforts de recherche n'ont pas encore démontré de tels robots mous prototypiques avec des épines dorsales conductrices en origami avec un potentiel de détection et de communication. Par conséquent, les scientifiques sont désireux de développer un nouveau schéma de fabrication pour produire mécaniquement stable, backbones robotiques souples et conducteurs.
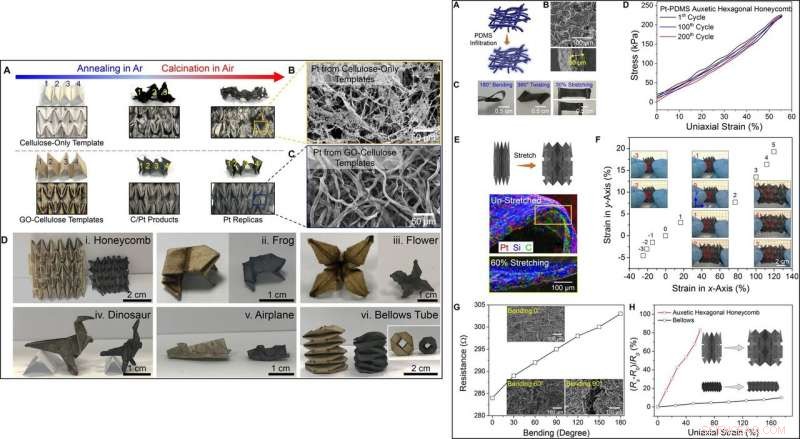
GAUCHE :Fabrication de structures en origami en métal. (A) Photos des produits d'origami en métal hexagonal quadruple et auxétique synthétisés à partir de modèles de cellulose uniquement (rangée du haut) et de GO-cellulose (rangée du bas). Les produits à base de Pt à différentes étapes de recuit/calcination sont présentés. Images SEM de produits Pt synthétisés à partir de modèles (B) uniquement en cellulose et (C) GO-cellulose. (D) Photos d'origami GO-cellulose et de répliques d'origami Pt réduites selon le modèle, y compris (i) nid d'abeille, (ii) grenouille, (iii) fleur, (iv) dinosaure, (v) avion, et (vi) tube à soufflet. DROITE :Transformation de répliques d'origami en Pt en métamatériaux déformables en élastomère de Pt. (A) L'infiltration de liquide d'élastomère dilué dans des répliques de Pt modèles permet la fabrication de métamatériaux d'élastomère de Pt. (B) Images SEM descendantes et transversales du composite Pt-élastomère. L'épaisseur du composite Pt-élastomère est d'environ 90 µm. (C) Grande déformabilité d'un film mince plan d'élastomère de Pt (flexion à 180°, Rotation à 360°, et 30% d'étirement). (D) Courbes de contrainte-déformation d'un origami hexagonal auxétique Pt-élastomère pendant le test de stabilité pendant 200 cycles. (E) Images SEM in situ avec cartographie EDS d'un pli d'élastomère Pt sous 90 % d'étirement uniaxial. (F) Les motifs de l'origami hexagonal auxétique Pt-élastomère dépendent de la déformation pendant les processus de compression uniaxiale (marqués de -1 à -3) et d'étirement (marqués de 1 à 5). Le chiffre marqué d'un 0 représentait l'état initial. (G) Changements de résistance d'un film plat en élastomère de Pt sous pliage de 0° à 180°. (H) Changements relatifs de résistance de l'origamis auxétique hexagonal et à soufflet en élastomère de Pt sous diverses contraintes uniaxiales. Rs est la résistance de l'origami Pt-élastomère sous déformations uniaxiales; R0 est la résistance de l'origami en élastomère de Pt non contraint. Crédit :Avancées scientifiques, doi:10.1126/scirobotics.aax7020.
Pendant le processus de fabrication, Yang et al. utilisé des multicouches d'oxyde de graphène (GO) pour intercaler une variété de précurseurs d'ions métalliques, suivi d'un recuit et d'une calcination à haute température pour produire les structures GO de grande dimension. Les répliques d'oxyde métallique comprenaient des microtextures, brins autoportants et structures d'origami complexes avec un excellent contrôle chimique et une réplication structurelle. La méthode dérivée de GO proposée fournira une nouvelle plate-forme pour produire des architectures métalliques complexes en tant que backbones multifonctionnels pour les robots mous.
Yang et al. converti les films de papier cellulosique ou les formes d'origami en une variété de répliques métalliques à l'aide du processus de création de modèles compatible GO. Ils ont suivi quatre étapes principales au cours du processus de fabrication en commençant par un modèle en forme de phénix pour former du sel de métal noble (Mn + )-complexes GO-cellulose intercalés (M-GO-cellulose). Les répliques métalliques résultantes ont subi d'autres processus de recuit et de calcination pendant la fabrication et l'équipe de recherche les a contrôlées en ajustant leur température de calcination. Les scientifiques ont créé des structures d'origami métalliques complexes telles que des nids d'abeilles hexagonaux, grenouilles, fleurs, dinosaures, des avions et des soufflets en convertissant diverses structures d'origami 3D à partir de papier cellulosique en métal platine.
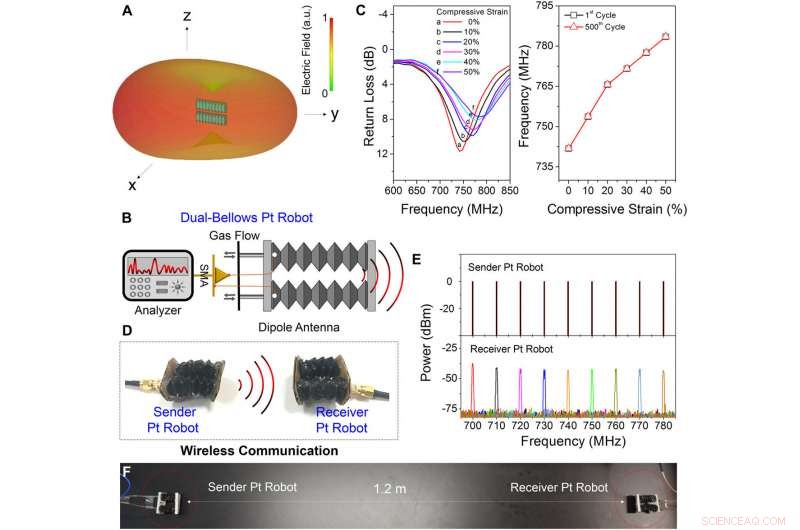
Robot Origami Pt avec capacités de communication sans fil intégrées. (A) Diagrammes de rayonnement 3D simulés pour deux tubes à soufflet en élastomère Pt à 741,8 MHz sous 0% de déformation. (B) Démonstration schématique d'un robot Pt à double soufflet, qui a également servi d'antenne dipôle reconfigurable. (C) Gauche :perte de retour de l'antenne dipôle reconfigurable sous différentes contraintes de compression de 0 à 50 %. À droite :les fréquences de résonance sont fonction des contraintes de compression avant et après les actionnements robotiques de 500 cycles. (D) Photographie d'un robot émetteur Pt (envoi de signaux) (à gauche) et d'un robot récepteur Pt (réception de signaux) (à droite). (E) Les signaux d'impulsion (le robot émetteur Pt envoyé) ont été bien reçus par le robot récepteur Pt. La fréquence des signaux envoyés était identique aux signaux reçus. (F) Deux robots Pt ont pu communiquer à distance sur une distance de 1,2 m. Crédit :Avancées scientifiques, doi:10.1126/scirobotics.aax7020.
Pour améliorer la stabilité mécanique, ils comprenaient des élastomères minces aux structures métalliques d'origami pour une grande déformabilité et une reconfiguration réversible. Yang et al. a choisi le platine en raison de sa préservation structurelle efficace, grande flexibilité mécanique et conductivité électrique élevée par rapport à l'or (Au) ou à l'argent (Ag). L'équipe a optimisé le squelette Pt-élastomère pour une conductivité électrique et une flexibilité mécanique élevées, pour que le composite planaire Pt-élastomère résultant supporte des déformations importantes et répétées, idéal pour les épines dorsales robotiques souples. Les épines dorsales métalliques reconfigurables ont introduit des fonctionnalités multiples et distinctes pour former des robots origami en métamatériaux, y compris un potentiel intrinsèque de résistance au feu. L'équipe de recherche a testé cette fonctionnalité en permettant aux robots Pt de maintenir un contact direct avec une flamme pendant une exposition prolongée (800 0 C pendant 30 secondes), en comparaison un robot en papier s'est allumé en quelques secondes (moins de 5 secondes).
Le squelette en élastomère de Pt était plus mince et plus léger que les robots en papier de cellulose, mais restait mécaniquement stable pendant l'actionnement robotique réversible. Le robot à base de papier nécessitait d'importants changements de pression pour s'allonger ou se contracter ; alors que le robot Pt ne nécessitait que des changements de pression plus faibles. Yang et al. puis a développé le robot origami conducteur Pt pour envoyer et recevoir des ondes électromagnétiques (EM) et servir d'antenne reconfigurable pour la communication sans fil. Avant la fabrication, l'équipe de recherche a simulé des diagrammes de rayonnement 3D pour explorer l'utilisation de robots Pt comme antennes rayonnantes et les a fabriqués par la suite. Les scientifiques ont également montré une communication sans fil entre deux robots Pt qui servaient d'émetteur et de récepteur. Lorsqu'un robot émetteur envoie des signaux d'impulsion à différentes fréquences, le robot récepteur stationné à 1,2 m les a reçus sans écart de fréquence entre les signaux émis et reçus.
Comparaison de la pression de gaz entre les robots papier et Pt. Crédit :Avancées scientifiques, doi:10.1126/scirobotics.aax7020.
L'équipe a comparé cinq catégories de fonctionnalités robotiques dans le travail pour démontrer les avantages techniques de l'utilisation des dorsales métalliques Pt compatibles GO par rapport à (1) la densité de la dorsale, (2) rigidité mécanique, (3) efficacité énergétique, (4) capacités de détection de contrainte et (5) capacités de communication sans fil. L'équipe de recherche a encore optimisé les deux robots Pt pour la communication sans fil, où un robot émetteur a transmis sans fil des instructions de navigation à un robot récepteur pour contourner avec succès un obstacle artificiel en suivant un chemin guidé.
L'équipe a ensuite étendu les applications du système en utilisant la fabrication additive 3-D, où ils ont combiné l'encre Pt-Go-cellulose avec la modélisation par dépôt de fusion (FDM) pour imprimer en 3D des formes moulées de squelette robotique métallique. Ensuite, ils ont conçu des robots Pt pour le contrôle à distance avec des champs magnétiques. Pour ça, Yang et al. synthétisé une réplique Pt avec de l'encre Pt-Go-cellulose et infiltré la solution de polymère avec des particules magnétiques pour créer un squelette Pt magnétique. Les nouvelles structures contenaient les capacités habituelles de détection de contrainte et de communication sans fil, avec mouvement magnétique ajouté. Les robots Pt magnétiques pourraient subir une transformation réversible de leur forme et de leur corps sous actionnement magnétique pour avancer en alignement avec les champs magnétiques rotatifs.
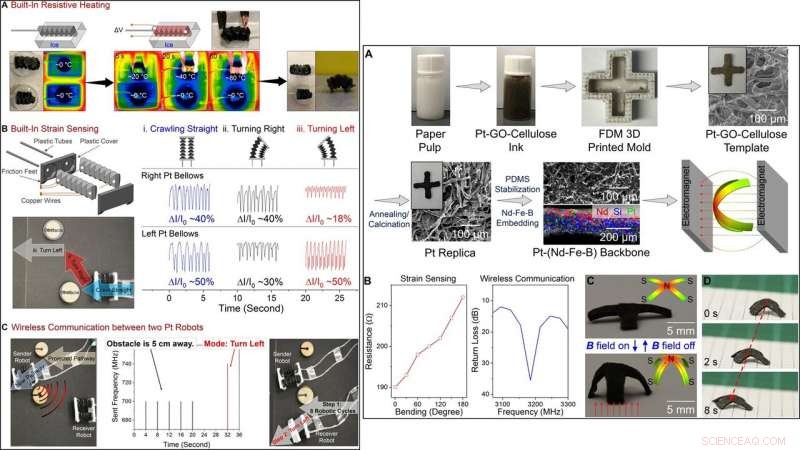
GAUCHE :Démonstrations de robots Pt multifonctionnels. (A) Robot Pt à soufflet unique avec capacité de chauffage résistif intégrée. Deux robots Pt ont été congelés dans des glaçons. Sous une tension appliquée de 20 V, le robot Pt supérieur a été rapidement chauffé à env. 80°C en 60 s, échappé de la glace, et a continué à ramper vers l'avant. (B) Robot Pt à double soufflet avec capacité de détection de contrainte intégrée. Les backbones robotiques Pt étaient connectés avec des fils de cuivre, et la connexion a été fixée à l'aide de pâte d'argent. La voie proposée pour le robot Pt à double soufflet impliquait (i) de ramper tout droit, (ii) tourner à droite, et (iii) tourner à gauche. Les actionnements robotiques le long de l'ensemble du trajet ont été surveillés en lisant les profils de courant des tubes à soufflet en Pt gauche et droit. (C) Communication sans fil entre deux robots Pt à double soufflet. Le robot émetteur a été bloqué par un obstacle sur le chemin projeté et a tourné à gauche pour contourner l'obstacle. Le robot émetteur a envoyé une série de signaux au robot récepteur. Les signaux ont ensuite été interprétés dans la ligne directrice mobile pour le robot récepteur, permettant au robot d'emprunter le chemin proposé sans rencontrer l'obstacle. À DROITE :fabrication d'un robot Pt à action magnétique à l'aide d'une encre Pt-GO-cellulose. (A) La fabrication alternative de robots Pt a été démontrée en développant une encre Pt-GO-cellulose et en l'incorporant à l'impression 3D FDM. Après un recuit/calcination en deux étapes, Stabilisation PDMS, et enrobage avec des particules de Nd–Fe–B, un robot tétrapode Pt–(Nd–Fe–B) actionné magnétiquement a été fabriqué. (B) Capacités de détection de contrainte et de communication sans fil intégrées du robot tétrapode Pt-(Nd-Fe-B). (C) Robot tétrapode Pt–(Nd–Fe–B) arqué de haut en bas sous des actionnements magnétiques. (D) Le robot tétrapode Pt–(Nd–Fe–B) a avancé en suivant les trajectoires des champs magnétiques tournants. Crédit :Avancées scientifiques, doi:10.1126/scirobotics.aax7020.
De cette façon, Haitao Yang et ses collègues ont développé un protocole de synthèse de modèles compatible Go pour produire des épines dorsales métalliques conformes et multifonctionnelles pour construire des robots origami métalliques. Les robots contenaient des capacités de détection de contrainte et de communication sans fil intégrées. Les épines dorsales métalliques synthétiques faites de métaux nobles complexes dont l'argent, l'or et le platine étaient des réplications structurelles élevées de leurs homologues en papier. Par rapport aux papiers et plastiques traditionnels, les backbones reconfigurables en élastomère Pt offraient un poids léger, déformabilité et efficacité énergétique. Yang et al. envisager des applications pratiques pour les robots origami métalliques allant des activités dans des environnements à haut risque, pour une utilisation dans les muscles artificiels et les bras robotiques, et en tant que robots télécommandés non attachés. Ils visent à optimiser les squelettes métalliques avec des matériaux électrochimiquement actifs pour former ensuite des dispositifs de stockage d'énergie. De tels développements enrichiront la bibliothèque de matériaux robotiques pour fabriquer divers robots souples avec une intégration hautement fonctionnelle.
© 2019 Réseau Science X