Pour tester l'efficacité de l'algorithme dans un entrepôt, les chercheurs ont demandé à un robot (bras blanc) de surveiller 10 participants effectuant des activités dans un environnement semblable à un entrepôt. Dans les trois secondes suivant la fin de chaque activité, le robot affichait un score sur son écran (à droite). Crédit :Parsa et al./IEEE Robotics and Automation Letters
En 2017, ils étaient près de 350, 000 incidents de travailleurs en arrêt maladie pour blessures musculaires, nerfs, ligaments ou tendons, comme le syndrome du canal carpien, selon le Bureau of Labor Statistics des États-Unis. Parmi les travailleurs avec le plus grand nombre d'incidents :les personnes qui travaillent dans les usines et les entrepôts.
Les troubles musculo-squelettiques surviennent au travail lorsque les personnes adoptent des postures inconfortables ou effectuent des tâches répétées. Ces comportements génèrent une tension sur le corps au fil du temps. Il est donc important de signaler et de minimiser les comportements à risque pour garder les travailleurs en bonne santé au travail.
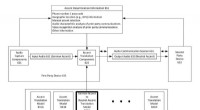
Des chercheurs de l'Université de Washington ont utilisé l'apprentissage automatique pour développer un nouveau système capable de surveiller les employés d'usine et d'entrepôt et de leur dire à quel point leurs comportements sont risqués en temps réel. L'algorithme divise une série d'activités, telles que soulever une boîte d'une étagère haute, le porter à une table et le mettre en place en actions individuelles, puis calcule un score de risque associé à chaque action.
L'équipe a publié ses résultats le 26 juin dans Lettres de robotique et d'automatisation IEEE et présentera les résultats le 23 août à la conférence internationale IEEE sur la science et l'ingénierie de l'automatisation à Vancouver, Colombie britannique.
« À l'heure actuelle, les travailleurs peuvent effectuer une auto-évaluation où ils remplissent leurs tâches quotidiennes sur une table pour estimer le degré de risque de leurs activités, " a déclaré l'auteur principal Ashis Banerjee, professeur assistant dans les départements de génie industriel et des systèmes et de génie mécanique de l'UW. "Mais ça prend du temps, et il est difficile pour les gens de voir comment cela leur profite directement. Nous avons maintenant rendu tout ce processus entièrement automatisé. Notre plan est de le mettre dans une application pour smartphone afin que les travailleurs puissent même se surveiller et obtenir un retour immédiat."
Pour ces auto-évaluations, les gens utilisent actuellement un instantané d'une tâche en cours d'exécution. La position de chaque articulation obtient un score, et la somme de tous les scores détermine à quel point cette pose est risquée. Mais les travailleurs effectuent généralement une série de mouvements pour une tâche spécifique, et les chercheurs voulaient que leur algorithme puisse calculer un score global pour l'ensemble de l'action.
Le passage à la vidéo est plus précis, mais cela nécessite une nouvelle façon d'additionner les scores. Pour entraîner et tester l'algorithme, l'équipe a créé un ensemble de données contenant 20 vidéos de trois minutes de personnes effectuant 17 activités courantes dans les entrepôts ou les usines.
"L'une des tâches que nous avons demandé aux gens était de prendre une boîte d'un rack et de la placer sur une table, " a déclaré le premier auteur Behnoosh Parsa, un étudiant au doctorat en génie mécanique de l'UW. "Nous voulions capturer différents scénarios, alors parfois ils devaient tendre les bras, tordre leur corps ou se penche pour ramasser quelque chose."
Les chercheurs ont capturé leur ensemble de données à l'aide d'une caméra Microsoft Kinect, qui a enregistré des vidéos en 3D qui leur ont permis de cartographier ce qui arrivait aux articulations des participants pendant chaque tâche.
En utilisant les données Kinect, l'algorithme a d'abord appris à calculer les scores de risque pour chaque image vidéo. Ensuite, il a progressé pour identifier le début et la fin d'une tâche afin de pouvoir calculer un score de risque pour une action entière.

Pour entraîner et tester l'algorithme, l'équipe a créé un ensemble de données contenant 20 vidéos de trois minutes de personnes effectuant 17 activités courantes dans les entrepôts ou les usines. Crédit :Université de Washington
L'algorithme a qualifié trois actions de l'ensemble de données de comportements à risque :ramasser une boîte sur une étagère haute, et placer une boîte ou une tige sur une étagère haute.
Aujourd'hui, l'équipe développe une application que les ouvriers et les superviseurs d'usine peuvent utiliser pour surveiller en temps réel les risques de leurs actions quotidiennes. L'application fournira des avertissements pour les actions à risque modéré et des alertes pour les actions à haut risque.
Finalement, les chercheurs veulent que les robots dans les entrepôts ou les usines puissent utiliser l'algorithme pour aider à garder les travailleurs en bonne santé. Pour voir à quel point l'algorithme pourrait fonctionner dans un entrepôt hypothétique, les chercheurs ont fait surveiller par un robot deux participants effectuant les mêmes activités. Dans les trois secondes suivant la fin de chaque activité, le robot affichait un score sur son écran.
« Les usines et les entrepôts utilisent l'automatisation depuis plusieurs décennies. Maintenant que les gens commencent à travailler dans des environnements où des robots sont utilisés, nous avons une opportunité unique de diviser le travail pour que les robots fassent les travaux risqués, " Banerjee a déclaré. "Les robots et les humains pourraient avoir une collaboration active, où un robot peut dire, «Je vois que vous ramassez ces objets lourds sur l'étagère du haut et je pense que vous le faites peut-être souvent. Laissez-moi vous aider.'"