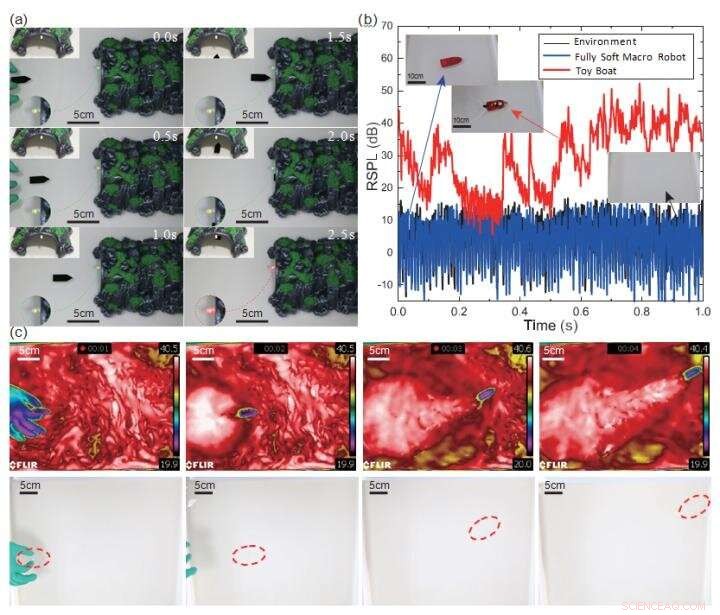
(a) Photographies d'un robot ciblant un chemin indiqué par LED. La démonstration de ciblage montre la précision que le contrôle du robot peut atteindre. (b) Comparaison du niveau de bruit relatif mesuré d'un robot macro logiciel et d'un robot alimenté par batterie, bateau jouet de taille similaire. RSPL désigne le niveau de pression acoustique relatif. Le robot présente un niveau de bruit beaucoup plus faible par rapport au bateau jouet. (c) Photographies d'un robot froid se déplaçant dans l'eau chaude prises par une caméra vidéo infrarouge et une caméra normale, respectivement. Crédit :©Science China Press
Les robots souples ont attiré beaucoup d'attention au cours des dernières années pour leurs caractéristiques uniques par rapport aux robots rigides traditionnels. Cependant, contrairement au Baymax du film "Big Hero 6, " le robot mou à la pointe de la technologie n'est qu'un prototype en laboratoire, généralement attaché, ce qui signifie qu'il nécessite un fil électrique ou un tube pneumatique pour l'alimentation. Pour exploiter tout le potentiel des robots mous, la conception non attachée est préférée. Les approches existantes pour équiper les robots mous d'une conception non attachée impliquent généralement des sources d'alimentation à haute densité d'énergie, ce qui entraîne des problèmes d'intégration, sinon, le robot sera encombrant et maladroit pour transporter des sources d'énergie à faible densité d'énergie.
Dans la nature se trouvent d'énormes créatures qui ont évolué pendant des milliards d'années pour survivre. Les staphylins du genre Stenus, un type d'insectes terrestres vit autour des mares ou des ruisseaux, gagneraient une explosion d'énergie cinétique pour s'échapper lorsqu'ils tombaient accidentellement sur l'eau, en sécrétant des produits chimiques pour générer un gradient d'énergie de surface. Un tel processus propulsif, communément appelé Marangoni Propulsion, a été adopté par des créatures vivantes, donc c'était doux et doux, totalement compatible avec les matériaux souples.
Dans un nouvel article de recherche publié dans le journal basé à Pékin Revue scientifique nationale , Des scientifiques de l'Université des sciences et de la technologie de Huazhong rapportent un robot entièrement mou non attaché dans un liquide dont l'actionnement utilise des gradients énergétiques environnementaux. En libérant des matières actives environnementales (MAE) dans l'environnement liquide, le robot pourrait gagner une vitesse agile de 5,5 longueurs de corps par seconde, ce qui est 7 fois plus élevé que la meilleure valeur rapportée chez le poisson robotique mou non attaché.
« Quelques avantages découlent de l'adoption d'un tel mécanisme, comme le calme, pas de fatigue thermique et ainsi de suite." Le professeur Zhigang Wu a déclaré :"Plus important, l'actionnement et la réalisation fonctionnelle du robot peuvent être complétés séparément. Le designer, pour la première fois, a la possibilité de se concentrer sur la réalisation de la fonction. Cela pourrait permettre au robot logiciel dans certains scénarios intacts à l'avenir. »