Les experts Javier Burgués et Santiago Marco, de la Faculté de Physique de l'Université de Barcelone et de l'Institut de Bioingénierie de Catalogne. Crédit :IBEC
La détection de gaz dangereux dans les bâtiments effondrés en raison de tremblements de terre ou d'explosions et la localisation des victimes dans des endroits difficiles d'accès font partie des scénarios d'utilisation du Smelling Nano Aerial Vehicle (SNAV), un nanodrone conçu et réalisé par les chercheurs Santiago Marco et Javier Burgués de la Faculté de Physique de l'Université de Barcelone et de l'Institut de Bioingénierie de Catalogne (IBEC).
Un drone est un aéronef piloté par télécommande. Les nanodrones sont des plateformes opérationnelles pesant moins de 250 grammes.
Le nanodrone SNAV, décrit pour la première fois dans un article de la revue Capteurs , pèse 35 grammes et est conçu pour voler et identifier les gaz dans des scénarios que d'autres véhicules distants ne peuvent pas naviguer. Il possède des capteurs de gaz nanométriques MOX qui peuvent répondre à des gaz tels que le monoxyde de carbone (CO) ou le méthane (CH
Différent des autres gadgets plus gros, SNAV est capable de travailler dans des espaces intérieurs et peut intervenir dans des zones étendues où la source d'émission chimique est difficile d'accès (faux plafonds, systèmes de conduits d'air, etc.).
SNAV :de la détection des gaz toxiques au sauvetage des victimes
Ce nouveau dispositif serait particulièrement utile dans les "opérations de sauvetage dans les bâtiments effondrés en raison de tremblements de terre et d'explosions. Le SNAV peut détecter les gaz toxiques et même les composés expirés par les victimes inconscientes, et rechercher des drogues ou des explosifs dans des endroits difficiles d'accès, " dit Santiago Marco, chercheur principal à l'IBEC et membre du Département de génie électronique et biomédical de l'UB, qui a dirigé la nouvelle étude de recherche.
Dans ces situations après un tremblement de terre ou une explosion, les équipes de secours ont généralement des chiens dressés pour trouver des victimes. La possibilité d'utiliser des robots autonomes dans ces tâches représente une nouvelle option.
"Les robots terrestres concentraient la recherche sur le domaine de la localisation basée sur la signalisation chimique. Aujourd'hui, la possibilité d'utiliser des nanodrones élargit la capacité et la rapidité des robots à se déplacer dans un espace intérieur et à surmonter des obstacles tels que des escaliers, " dit Marco, responsable de la signalisation intelligente pour les systèmes de capteurs en bio-ingénierie, UB-IBEC.
Surmonter les effets des turbulences et des problèmes de navigation
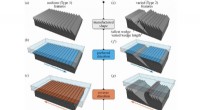
Les limitations concernant le poids et l'utilisation du nanodrone et les effets négatifs de la turbulence du rotor sur les signaux des capteurs sont de grands points d'inflexion pour la conception et le développement technique des nanodrones comme le SNAV. Pour vaincre l'effet négatif des turbulences, qui affecte le processus d'obtention des données, l'équipe UB-IBEC a appliqué des techniques de procédure de signal qui obtiennent des informations utiles des capteurs du SNAV.
Un autre point critique est l'auto-localisation du nanodrone dans des scénarios d'action. En général, le mécanisme de contrôle des drones qui parcourent de grandes distances dans des espaces ouverts est basé sur un système de navigation GPS. Cependant, ce n'est pas une option viable pour les appareils qui volent dans les espaces intérieurs.
"Le nouveau nanodrone dispose d'accéléromètres et de gyroscopes qui facilitent la navigation, mais sans la précision attendue pour la localisation. Par conséquent, cette fonction est basée sur une série de six émetteurs-récepteurs radiofréquence situés dans des positions connues, et un émetteur-récepteur sur le même drone. Ce système nous permet de faire voler le nanodrone à la position que nous voulons, " dit Javier Burgués (UB-IBEC), premier auteur de l'étude.
De nouveaux algorithmes inspirés du comportement animal
Dans le cadre de l'étude, l'équipe d'experts UB-IBEC a travaillé sur la plateforme SNAV, calibrer les capteurs et vérifier ses fonctions ainsi que programmer les algorithmes de traitement des données, communication et navigation robotique. Tous les essais de navigation robotique du SNAV ont été réalisés à l'Université d'Örebro (Suède) en collaboration avec les experts Víctor Hernández et Achim J. Lilienthal.
Les chercheurs ont l'intention d'explorer des algorithmes de navigation bio-inspirés basés, par exemple, sur le comportement des insectes tels que les moustiques ou les mites. « Un autre axe sur lequel nous voulons travailler est la fusion des données de plusieurs capteurs de gaz pour augmenter la sélectivité envers certains composés d'intérêt. Dans ce cas, les chercheurs travailleraient sur des expériences dans des scénarios complexes et avec des interférences chimiques, " dit Santiago Marco.