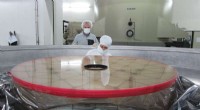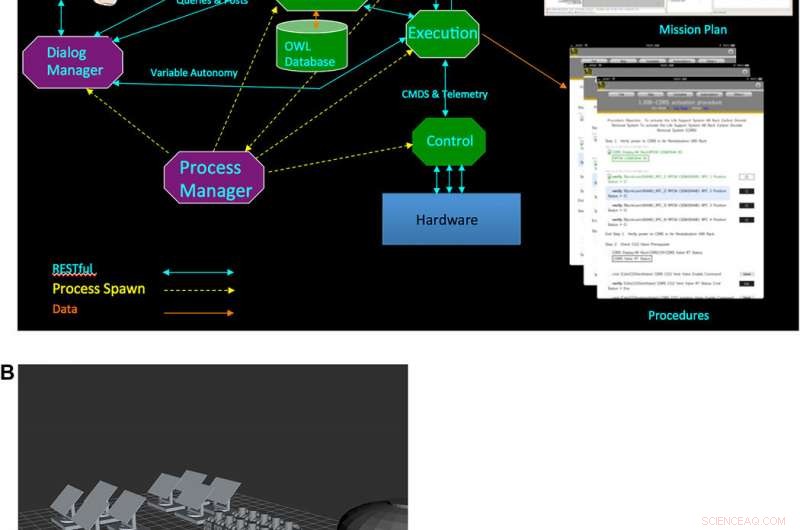
Fig. 1 Un agent intelligent, comme HAL 9000. (A) La conception architecturale CASE de haut niveau. Le planificateur génère un plan d'activité dont les actions sont des procédures exécutées par le système d'exécution, lequel, à son tour, interfaces avec le matériel via le logiciel de contrôle. Les systèmes de planification et d'exécution tirent des informations et mettent à jour l'ontologie du système, une base de données intelligente. Un gestionnaire de processus génère les principaux composants du système et reconstitue les processus si leur infrastructure informatique de support tombe en panne. L'utilisateur interagit avec l'agent via un gestionnaire de dialogue. (B) La base planétaire rendue dans notre système de visualisation de robot (wiki.ros.org/rviz). Le robot du panneau de commande connecte les panneaux solaires (en arrière-plan) aux batteries (à mi-sol à droite) et les batteries aux boîtiers d'alimentation (boîtes noires) qui, à son tour, se connecter à l'habitat (premier plan à droite). Le deuxième robot effectue des tâches de recherche et de récupération. Crédit: Robotique scientifique (2018). DOI :10.1126/scirobotics.aav6610
Une équipe d'ingénieurs de TRACLabs Inc. aux États-Unis progresse vers la création d'un système de surveillance de station de base planétaire similaire à certains égards à Hal 9000, le tristement célèbre système d'IA du film. 2001 :L'Odyssée de l'Espace . Dans ce cas, elle s'appelle architecture cognitive pour agents spatiaux (CASE) et est décrite dans un article Focus de Pete Bonasso, l'ingénieur principal travaillant sur le projet, dans la revue Robotique scientifique .
Bonasso explique qu'il s'intéresse à la création d'un véritable Hal 9000 depuis qu'il a regardé le film en tant qu'étudiant, sans le meurtre humain, bien sûr. Son système est conçu pour faire fonctionner une base située sur une autre planète, comme Mars. Il est destiné à prendre soin des plus banals, mais des tâches critiques liées au maintien d'une base planétaire habitable, comme le maintien des niveaux d'oxygène et la gestion des déchets. Il note qu'un tel système doit savoir quoi faire et comment le faire, effectuer des activités à l'aide de matériel tel que des bras de robot. À cette fin, CASE a été conçu comme un système à trois couches. Le premier est en charge du contrôle du matériel, tels que les systèmes d'alimentation, soutien de la vie, etc.
La deuxième couche est plus intelligente :elle est chargée d'exécuter le logiciel qui contrôle le matériel. La troisième couche est encore plus intelligente, responsable de trouver des solutions aux problèmes au fur et à mesure qu'ils surviennent - si un module est endommagé, par exemple, il doit être isolé des autres modules le plus rapidement possible. Le système a également ce que Bonasso décrit comme un système ontologique - son travail consiste à être conscient de lui-même afin que le système puisse porter des jugements lors de la comparaison des données des capteurs avec ce qu'il a appris dans le passé et avec les informations reçues des occupants humains. À cette fin, le système devra interagir avec ces humains de manière similaire à celles décrites dans le film.
Bonasso rapporte que lui et son équipe ont construit un prototype de réalité virtuelle d'une base planétaire, que CASE a jusqu'à présent réussi à faire fonctionner jusqu'à quatre heures. Il reconnaît qu'il reste encore beaucoup à faire. Heureusement, ils ont encore beaucoup de temps, car les plans pour l'habitation humaine de Mars et au-delà sont encore dans des décennies.
© 2018 Réseau Science X