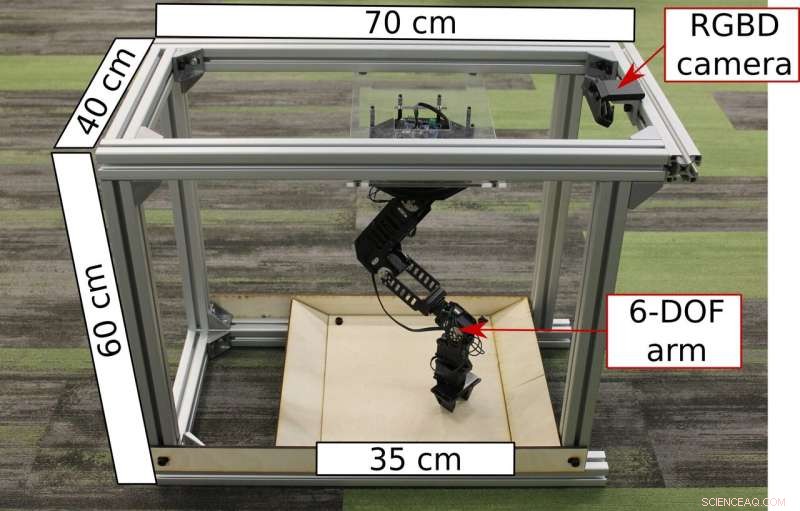
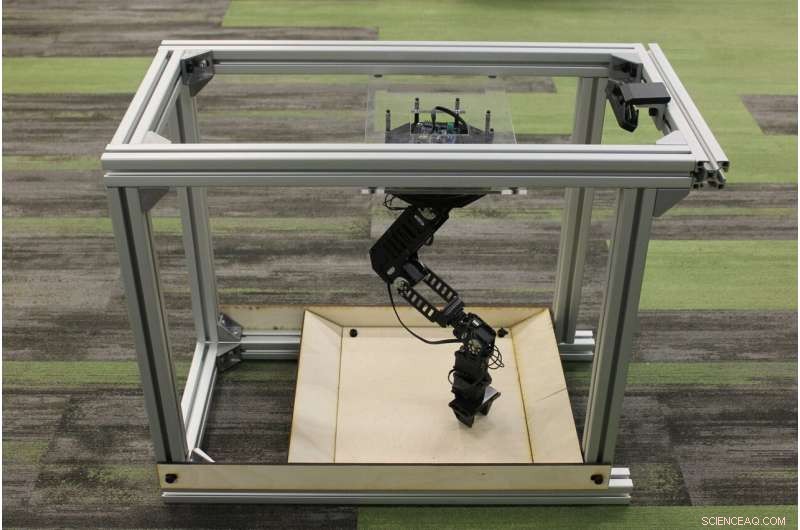
Un gros plan de la cellule REPLAB avec des annotations. Crédit :Yang et al.
Des chercheurs de l'UC Berkeley ont mis au point une méthode reproductible, plate-forme de référence à faible coût et compacte pour évaluer les approches d'apprentissage robotique, qu'ils ont appelé REPLAB. Leur récente étude, présenté dans un article pré-publié sur arXiv, a été soutenu par Berkeley DeepDrive, l'Office des recherches navales (ONR), Google, NVIDIA et Amazon.
« Les approches basées sur l'apprentissage automatique ont récemment commencé à devenir populaires en robotique, mais il n'existe actuellement aucun moyen facile de comparer les approches en raison de différences majeures dans les configurations matérielles utilisées dans divers laboratoires, " Brian Yang, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Par exemple, en saisissant la recherche, tout, du type de bras ou de préhenseur jusqu'au matériau dont est fait le préhenseur, affecte les performances de préhension, donc même si vous obtenez une meilleure précision de saisie qu'une méthode de l'année dernière, il n'est pas clair si cela est dû à un meilleur contrôle ou simplement à un meilleur matériel."
Dans les années récentes, il y a eu un besoin croissant de mesures standardisées et de plates-formes de référence pour évaluer les approches d'apprentissage automatique pour la robotique. Établir des références efficaces peut parfois être difficile, notamment pour l'apprentissage de la robotique, où les robots sont censés généraliser les modèles appris à de nouveaux objets et situations. La nouvelle plate-forme de référence développée à l'UC Berkeley fournit une solution peu coûteuse et facilement reproductible pour tester les approches de manipulation d'objets robotiques.
« D'autres applications de l'apprentissage automatique telles que la vision par ordinateur et le traitement du langage naturel ont grandement bénéficié des ensembles de données et des références, car ils conduisent la recherche à se concentrer sur des problèmes importants, fournir un moyen de tracer les progrès d'une communauté de recherche, et aider à identifier rapidement, disséminer, et améliorer les idées qui fonctionnent bien, " Dinesh Jayaraman, un autre chercheur impliqué dans l'étude, a déclaré TechXplore. "Nous avons conçu REPLAB pour remplir cette fonction pour la communauté de recherche sur l'apprentissage des robots."
Deux cellules REPLAB empilées les unes sur les autres. Crédit :Yang et al.
REPLAB a plusieurs composants, comprenant un bras robotisé, une caméra et un espace de travail, placé dans un espace cuboïde de 70 x 40 x 60 cm. La plate-forme coûte environ 2 000 $ à construire et peut être assemblée en quelques heures seulement. Sa conception compacte et à faible coût pourrait permettre à plus de chercheurs, même ceux qui ont un budget restreint, évaluer leurs cadres et leurs approches.
"REPLAB est une plate-forme matérielle entièrement standardisée pour la manipulation robotique conçue pour une adoption facile, " a expliqué Jayaraman. " Il contient un seul bras à faible coût (Trossen WidowX), une caméra RVB-D (Intel Realsense SR300) et un standardisé, espace de travail compact et facile à assembler en quelques heures grâce à nos instructions de montage. Tous réunis, une cellule REPLAB entière coûte environ 2 000 USD (par rapport aux configurations de bras standard qui coûtent 40 à 50 000 USD), occupant environ 10 fois moins d'espace qu'une configuration de bras standard."
En plus de la plate-forme elle-même, les chercheurs ont proposé un modèle de référence de saisie comprenant une définition de tâche et un protocole d'évaluation, mesures de performance et un ensemble de données de 92, 000 tentatives de saisie. Les bases de référence de ce référentiel ont été établies via la mise en œuvre, évaluation et analyse de plusieurs approches de saisie existantes.
« Parce que nous avons cette plate-forme matérielle standardisée, nous sommes également en mesure de partager un progiciel open source avec des implémentations de divers algorithmes d'apprentissage de robots (jusqu'à présent, algorithmes d'apprentissage supervisé pour la préhension et algorithmes d'apprentissage par renforcement pour atteindre des points en 3D), " dit Jayamaran. " Si vous construisez votre propre cellule REPLAB, vous pouvez télécharger une image Docker contenant ces implémentations et les exécuter directement sur votre cellule."
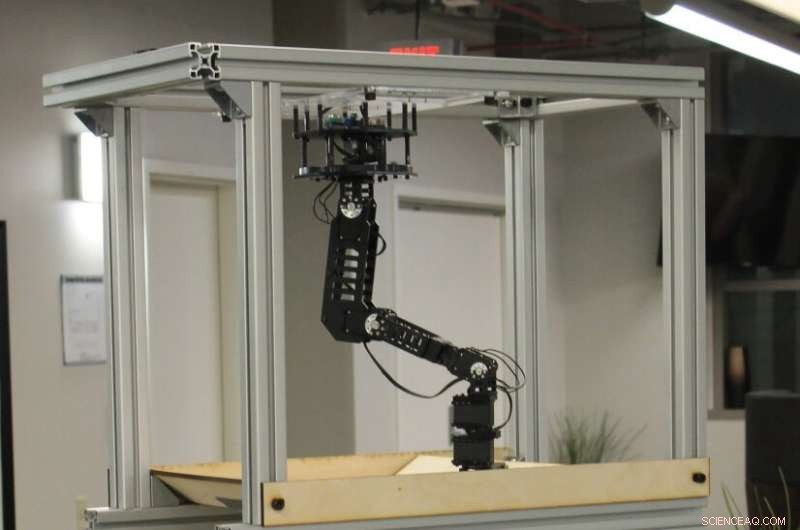
Une cellule REPLAB sans annotations. Crédit :Yang et al.
Jusque là, les chercheurs ont principalement réalisé des évaluations visant à vérifier la faisabilité de REPLAB en tant que plateforme de recherche reproductible en apprentissage robotique, en se concentrant sur deux tâches particulières :la préhension et l'atteinte d'un point en 3D. En d'autres termes, ils ont utilisé leur plate-forme pour mettre en œuvre et évaluer plusieurs approches d'apprentissage supervisé en profondeur pour ces tâches de saisie particulières. Leurs résultats suggèrent que la plate-forme expose les algorithmes existants à des défis quelque peu sous-étudiés qui sont cruciaux pour le développement de robots performants dans la nature, comme un actionnement bruyant.
« Nous avons également vérifié que les résultats restent cohérents entre plusieurs cellules REPLAB, ce qui est important pour penser que les implémentations et les évaluations d'algorithmes basées sur REPLAB sont reproductibles, " a déclaré Jayamaran. " Nous pensons que REPLAB facilitera des mesures de progrès cohérentes et reproductibles pour l'apprentissage des robots, abaisser la barrière à l'entrée en robotique pour les chercheurs dans des disciplines connexes comme l'apprentissage automatique, et encouragez le partage du code et des données entre les chercheurs. »
La nouvelle plateforme introduite par Yang, Jayaraman et leurs collègues pourraient bientôt permettre à davantage de chercheurs d'évaluer des approches pour un large éventail de tâches de manipulation. Comme d'autres plates-formes de banc, cependant, afin de réussir, l'utilisation de REPLAB devrait impliquer la communauté de recherche sur l'apprentissage des robots dans son ensemble.
« Bien que nous nous investissions dans la maintenance de la plate-forme pour de nombreuses années à venir, nous invitons les contributions de la communauté, telles que de nouvelles implémentations d'algorithmes, ensembles de données, et benchmarks et à notre plateforme open source, " Jayaraman a déclaré. " La grande vision est d'atteindre un point où si un nouvel algorithme d'apprentissage de robot de pointe est publié, un chercheur assis n'importe où dans le monde serait en mesure de télécharger, évaluer, itérer et améliorer une implémentation en quelques jours. Nous pensons que REPLAB aide à accélérer la recherche en faisant deux choses :abaisser la barrière d'entrée et permettre à beaucoup plus de personnes de participer à des recherches de pointe, et permettant ce type d'itération et d'amélioration rapides grâce au partage de code."
Dans leurs futurs travaux, les chercheurs de l'UC Berkeley prévoient de développer davantage leur plate-forme, l'ajout d'un simulateur de cellule REPLAB complet et d'algorithmes pour un contrôle robuste, tout en relevant de nouveaux défis de manipulation. Ils espèrent également élargir le référentiel officiel REPLAB github et l'image docker, y compris les implémentations d'algorithmes plus à la pointe de la technologie.
© 2019 Réseau Science X