Sortie du réseau de neurones pour contrôler les moteurs du robot. Crédit :Blanchard, Aihara &Lévi.
Dans les années récentes, de plus en plus d'études visent à développer des robots inspirés de la nature, notamment par certaines espèces animales. Dans une étude publiée dans le Journal of Robotics d'Atlantis Press, Réseautage et vie artificielle, une équipe de chercheurs de l'université de Bordeaux et de l'université de Tokyo a créé un robot qui ressemble à un serpent tant par sa forme que par ses mouvements.
"L'objectif principal de cette recherche était de développer un robot pour des applications biomédicales, en particulier les lésions de la moelle épinière, " Timothée Lévi, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. « Nous aimerions concevoir de nouvelles neuroprothèses où les neurones artificiels peuvent remplacer les neurones biologiques. Dans notre robot, nous avons utilisé une locomotion biomimétique utilisant des réseaux de neurones à pointes biomimétiques, qui reproduit le même comportement que les serpents ont dans la nature."
L'un des principaux défis lors du développement de robots bio-inspirés est de reproduire efficacement la locomotion de l'animal d'intérêt. Chez les animaux, la plupart des mouvements sont générés par l'activité des réseaux de génération de motifs centraux (CPG).
Essentiellement, Les CPG sont des circuits neuronaux qui, lorsqu'il est activé, peut produire des schémas moteurs rythmiques (par exemple, marcher, respiration, nager, etc.) en l'absence d'entrées sensorielles et temporelles. Autrefois, Les GPC et leurs effets sur la locomotion animale ont fait l'objet d'un grand nombre d'études.
Généralement, les chercheurs qui tentent de développer des robots ressemblant à des animaux reproduisent des CPG à l'aide de simples modèles de neurones ou d'oscillateurs, qui ne sont pas des échelles de temps biologiques, et sont donc considérés comme des systèmes bio-inspirés plutôt que bio-mimétiques. Ces modèles, cependant, fournissent simplement des oscillations sinusoïdales, et sont donc incapables de reproduire fidèlement une variété de modèles de locomotion animale.
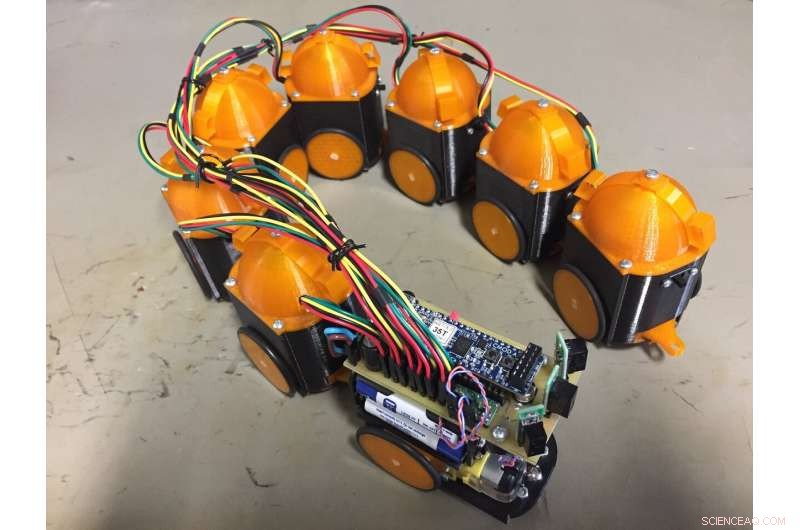
Le robot serpent développé par les chercheurs. Crédit :Blanchard, Aihara &Lévi.
Dans leur étude, Levi et ses collègues ont entrepris de développer des CPG biomimétiques capables de reproduire efficacement le comportement biologique, à l'aide d'un système neuromorphique numérique en temps réel. Le robot serpent qu'ils ont développé a deux composants clés, l'un agissant comme son cerveau et l'autre comme son corps.
"Notre robot serpent peut être divisé en 2 parties, " expliqua Levi. " Le premier est son cerveau, en utilisant des réseaux de neurones biomimétiques. Ce réseau de neurones est très proche de la biologie avec un modèle de neurone biophysique, synapses et plasticité. La deuxième partie est le corps, qui a différents "wagons" qui modélisent les différentes parties de la moelle épinière et des segments de serpents. Le signal est créé par le cerveau du serpent et il se propage dans tout le corps en contrôlant les différents moteurs."
Le robot serpent créé par Levi et ses collègues est contrôlé en temps réel par un réseau de CPG biomimétiques. Les chercheurs ont montré que leur système peut être connecté à des neurones biologiques et pourrait également être utilisé pour simuler différentes hypothèses ou protocoles de traitements pour des applications biomédicales, comme les lésions de la moelle épinière et les neuroprothèses.
"À mon avis, l'aspect le plus significatif de notre étude est que nous avons essayé d'être fidèles à la biologie et avons réussi à intégrer le réseau de neurones dans une petite perle électronique, " dit Levi. " Fait intéressant, le robot que nous avons créé fonctionne en temps réel et a les mêmes caractéristiques que dans la nature (période de locomotion, variabilité, bruit, etc.)."
À l'avenir, le robot serpent développé par Levi et ses collègues pourrait avoir une variété d'applications intéressantes en robotique et dans d'autres domaines. Par exemple, il pourrait être utilisé pour mieux comprendre le comportement des reptiliens ou il pourrait avoir plusieurs applications robotiques bio-hybrides.
"Nous prévoyons maintenant d'ajouter plus d'intelligence dans le cerveau du robot avec des règles d'apprentissage, ainsi que l'utilisation des différents capteurs, " dit Levi. " De plus, l'un de nos objectifs à plus long terme est de combiner des neurones artificiels et des neurones vivants pour créer un robot bio-hybride."
© 2019 Réseau Science X