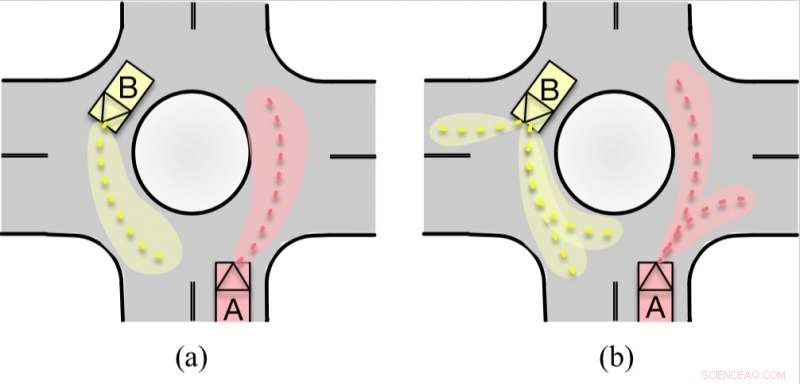
Démonstrations de (a) distributions prédites monomodales et (b) multimodales. Crédit :Hu, Zhan et Tomizuka.
Des chercheurs de l'Université de Californie (UC), Berkeley, ont récemment développé un modèle génératif qui peut prédire les mouvements séquentiels de paires d'agents en interaction, y compris les véhicules autonomes ainsi que les véhicules avec des conducteurs humains. Leur méthode, décrit dans un article prépublié sur arXiv, est interprétable, ce qui signifie qu'il peut expliquer la logique derrière ses prédictions, conduisant à une plus grande fiabilité et généralisabilité.
"Pour que les agents autonomes fonctionnent avec succès dans le monde réel, la capacité d'anticiper les mouvements futurs des entités environnantes dans la scène peut grandement améliorer leurs niveaux de sécurité, leur permettant d'éviter à l'avance les situations dangereuses, " Ouaip Hu, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore.
Des études antérieures ont obtenu des résultats remarquables dans la prédiction du comportement d'agents ou de véhicules individuels. Selon Hu et ses collègues, cependant, considérer ces agents individuellement est souvent inutile et limitatif, comme dans le monde réel (par exemple sur la route), ces agents interagissent généralement entre eux et leurs états sont donc couplés. De plus, à mesure que l'horizon prévu s'élargit, la modélisation des incertitudes de prédiction et des distributions multimodales pour les séquences futures devient de plus en plus difficile.
« Dans notre étude, nous avons relevé ce défi en présentant une approche de prédiction probabiliste multimodale, ", a déclaré Hu. "La méthode proposée est basée sur un modèle génératif et est capable de prédire conjointement les mouvements séquentiels de chaque paire d'agents en interaction."
Comme expliqué par Wei Zhan, un autre chercheur impliqué dans l'étude, cette prédiction conjointe permet finalement la prédiction de réaction des mouvements d'autres agents. Il peut fournir une réponse aux questions « et si », telles que « Quelles seraient les réactions possibles des autres si le véhicule autonome hôte entreprend une action spécifique à l'avenir ? » La prédiction de la réaction est extrêmement importante pour les véhicules autonomes dans des scénarios de conduite hautement interactifs.
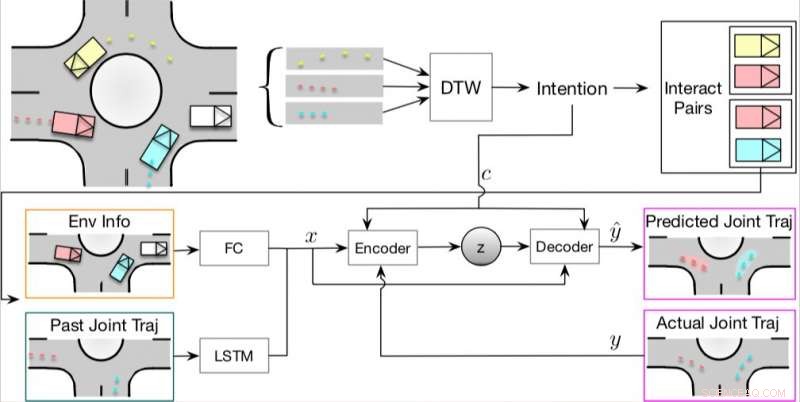
(a) La structure globale de la méthode proposée. (b) Carte des ronds-points de tous les chemins de référence. Crédit :Hu, Zhan et Tomizuka.
Le modèle développé par Hu et ses collègues est basé sur un algorithme clé, qui a une structure similaire aux autoencodeurs variationnels (VAE) traditionnels. Dans leur étude, les chercheurs ont utilisé leur modèle pour prédire les comportements interactifs entre deux véhicules, surnommé A et B.
« La multimodalité peut être vue à la fois sous des aspects discrets et continus, " expliqua Hu. " Il peut y avoir beaucoup de discrets, intentions de haut niveau qui sont fixées dans l'esprit d'un humain, comme tourner à gauche/droite ou sortir à une certaine voie dans le scénario du rond-point. Aussi, sous chaque intention, il existe plusieurs interactions continues telles que différents degrés de comportement pass/rendement. Par conséquent, il est nécessaire d'aborder la multimodalité lorsque l'on prédit les comportements futurs des autres véhicules, ce qui peut nous conduire à des résultats de prédiction plus précis et raisonnables."
Les données de mouvement du monde réel dans des scénarios de conduite hautement interactifs sont l'atout le plus important et la condition préalable à la recherche de prédiction de comportement et de mouvement. Les chercheurs ont utilisé un rond-point complexe à 7 voies avec une circulation dense pour collecter de grandes quantités de données de mouvement hautement interactives.
Les données qu'ils ont collectées ont été utilisées pour former et évaluer le modèle proposé, donnant des résultats très prometteurs. Leur approche a surpassé trois modèles alternatifs couramment utilisés pour prédire le mouvement des agents autonomes, à savoir la VAE conditionnelle, ensemble de perceptrons multicouches (MLP) et décrochage Monte Carlo (MC). À l'avenir, leur laboratoire publiera également un ensemble de données de mouvement plus complet.
« Dans nos récents travaux, nous avons montré le raisonnement sous-jacent au processus d'échantillonnage des résultats prédits, " a déclaré Hu. " Bien qu'il y ait encore un long chemin à parcourir pour bien comprendre ces algorithmes de la boîte noire (c'est-à-dire les réseaux de neurones), nous avons essayé de fournir des informations significatives sur un tel algorithme de boîte noire et avons essayé de rendre l'algorithme proposé sûr à utiliser. Si ces algorithmes de prédiction doivent un jour être utilisés dans de vrais véhicules autonomes, un raisonnement suffisant derrière l'algorithme de prédiction sera certainement nécessaire."
Le modèle conçu par Hu et ses collègues pourrait contribuer à améliorer la sécurité des véhicules autonomes, leur permettant de prédire les interactions entre les autres véhicules sur la route. Dans ses prochaines études, Hu prévoit d'approfondir le côté sécurité de l'algorithme de prédiction, tout en essayant de rendre le processus de prédiction plus transparent.
© 2019 Réseau Science X














