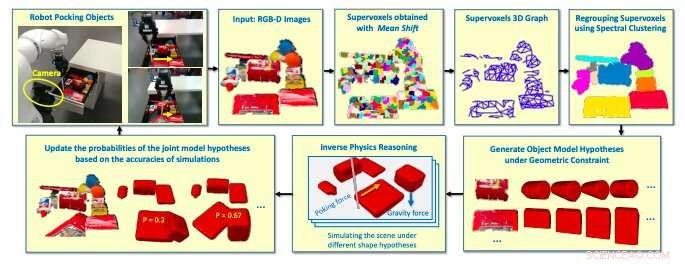
Flux de travail du système intégré. Crédit :Chanson &Boularias.
Des chercheurs de l'Université Rutgers ont récemment développé une approche probabiliste pour construire des modèles 3D d'objets inconnus alors qu'ils sont manipulés par un robot. Leur approche, décrit dans un article prépublié sur arXiv, utilise un moteur physique pour vérifier les géométries hypothétiques dans les simulations.
La plupart des primates apprennent naturellement à manipuler une variété d'objets au cours de leurs premières années de vie. En reproduisant cette capacité apparemment triviale dans les robots, cependant, s'est jusqu'à présent avéré très difficile.
Des études antérieures ont tenté d'y parvenir en utilisant une variété d'algorithmes de manipulation, qui nécessitent typiquement la connaissance des modèles géométriques associés aux objets que le robot va manipuler. Ces modèles peuvent être utiles si les objets rencontrés par le robot sont connus à l'avance, pourtant ils échouent souvent lorsque ces objets sont inconnus.
« Nous considérons spécifiquement les tâches de manipulation dans des tas de fouillis qui contiennent des objets jamais vus auparavant, ", ont écrit les chercheurs de l'Université Rutgers dans leur article. "L'un des aspects novateurs de ce travail est l'utilisation d'un moteur physique pour vérifier les géométries hypothétiques en simulation. Les preuves fournies par les simulations physiques sont utilisées dans un cadre probabiliste qui tient compte du fait que les propriétés mécaniques des objets sont incertaines."
Le système intégré développé par les chercheurs comporte plusieurs composants :un robot manipulateur, un module de segmentation et de clustering, et une unité de raisonnement physique inverse. Le manipulateur robotique est conçu pour pousser ou pousser des objets dans un tas de fouillis, tandis que le module de segmentation et de clustering peut détecter des objets dans des images RVB-D.
Finalement, l'unité de raisonnement physique inverse, qui fait la particularité de leur approche, déduit les parties manquantes des objets en rejouant les actions du robot en simulation. Essentiellement, l'unité utilise plusieurs formes hypothétiques et attribue des probabilités plus élevées à celles qui correspondent le mieux aux images RVB-D observées.
Les chercheurs ont développé un algorithme de raisonnement physique inverse (IPR) qui peut déduire des parties occluses d'objets en fonction de leurs mouvements observés et de leurs interactions mutuelles. Pour former et évaluer leur système, ils ont utilisé deux ensembles de données :un ensemble de données Voxlets et un nouvel ensemble de données créé à l'aide d'objets de référence YCB. L'ensemble de données Voxlets contient des images statiques d'objets de table, tandis que la nouvelle base de données compilée par eux comprend des piles d'objets plus denses.
L'équipe a évalué la nouvelle approche dans une série d'expériences utilisant un bras robotique Kuka monté sur une plate-forme mobile Clearpath et équipé d'une main Robotiq et d'une caméra de détection de profondeur. Dans ces épreuves, le robot a été présenté avec des objets inconnus dans différents scénarios. Les résultats recueillis par les chercheurs étaient très prometteurs, avec leur algorithme IPR inférant des formes mieux que d'autres approches.
« Des expériences utilisant un robot montrent que cette approche est efficace pour construire des modèles 3D physiquement réalistes, ce qui peut être utile pour la planification de la manipulation, ", ont écrit les chercheurs. "Les expériences montrent également que l'approche proposée surpasse de manière significative les approches alternatives en termes de précision de forme."
La nouvelle approche probabiliste présentée par les chercheurs pourrait aider à améliorer les performances des robots dans les tâches de manipulation. Dans leurs futurs travaux, ils envisagent de développer davantage leur approche, afin qu'il puisse déduire simultanément des modèles 3D et mécaniques.
© 2019 Réseau Science X














