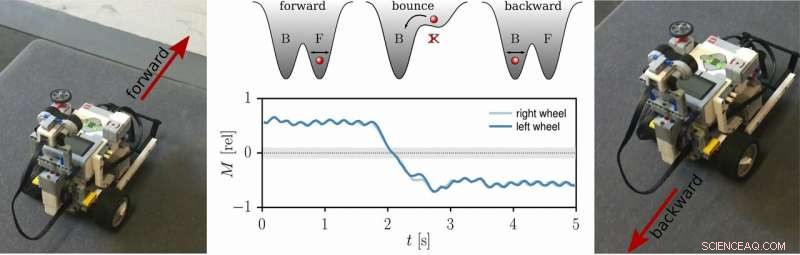
Illustrant comment le robot change de manière autonome les directions de locomotion lorsqu'il heurte un mur. Crédit :Sándor et al.
Une équipe de chercheurs de l'Université Babes-Bolyai, en Roumanie, et l'Université Goethe de Francfort ont récemment collaboré à une étude explorant les implémentations du contrôle des coups de pied sur des robots à roues simulés et réels. Le terme « kick control » fait référence à court, des commandes d'ordre supérieur qui peuvent être utilisées pour « lancer » un système d'un attracteur auto-organisé dans le bassin d'attraction d'un autre attracteur.
"Quand on bouge, nos muscles réagissent-ils simplement aux signaux que le cerveau envoie, ou tiennent-ils compte également de l'état des joints, des tendons et des muscles eux-mêmes ?" demanda Claudius Gros, l'un des chercheurs qui ont mené l'étude. "On parle de 'locomotion incarnée, ' si ce dernier est le cas. Notre recherche est dédiée à étudier comment l'incarnation aide les animaux et les robots à naviguer dans le monde."
Dans la nature, même les animaux dotés d'un système nerveux simple peuvent naviguer dans une variété d'environnements complexes. Afin de se déplacer dans des environnements connus et inconnus, les robots devraient avoir des habiletés sensorimotrices similaires. Jusque là, cependant, les scientifiques et les ingénieurs du monde entier ont du mal à concevoir des robots dotés de capacités motrices similaires à celles des humains et des animaux.
« Coordonner un grand nombre d'actionneurs dans un environnement en constante évolution est certainement une tâche difficile, " Bulcsú Sándor, un autre chercheur impliqué dans l'étude, a déclaré TechXplore. "Alors pourquoi ne laissons-nous pas le corps du robot faire le travail difficile, en prenant en charge une partie substantielle du calcul ? Suite à cette idée, nous proposons un schéma de contrôle alternatif dans lequel les modèles de mouvement sont générés de manière auto-organisée. Dans ce cadre, la locomotion est créée via une interaction dynamique entre le cerveau et le corps du robot, et l'environnement."
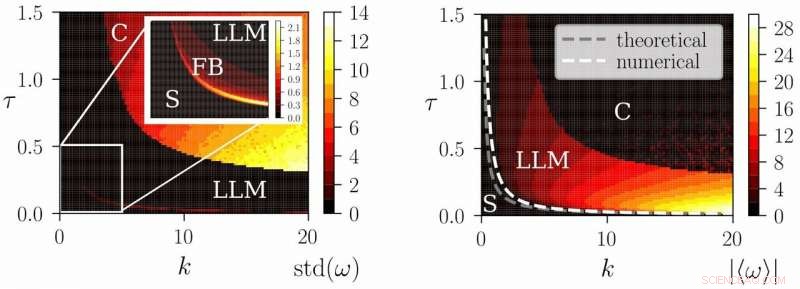
Diagramme de phase du système :comportements dynamiques en fonction des paramètres du contrôleur.
Sandor, Gros et leurs collègues ont conçu un cadre de contrôleur dans lequel les mouvements ne sont pas définis de manière rigide, mais sont plutôt décrits par un ensemble d'équations pour contrôler les actionneurs qui changent dynamiquement, intégrant les informations proprio-sensorielles du corps. Ils ont ensuite testé et affiné ces équations dans l'environnement de simulation LPZRobots.
"En raison de l'interaction du robot avec son environnement, plusieurs modèles de mouvement auto-organisés peuvent être créés, " Sándor a déclaré. "Cela nous permet de basculer entre ces primitives comportementales par un signal de contrôle de type coup de pied bien défini. C'est ce que nous appelons le « kick control ». Finalement, comme preuve de concept, nous avons mis en œuvre cette idée sur des robots à roues du monde réel."
Coordonner la contraction des nombreux muscles du corps est une tâche très difficile, qui est acquis de façon innée par la plupart des humains et des animaux. Dans leur étude, Sandor, Gros et leurs collègues ont essayé de concevoir une méthode plus simple pour inculquer la motricité aux robots.
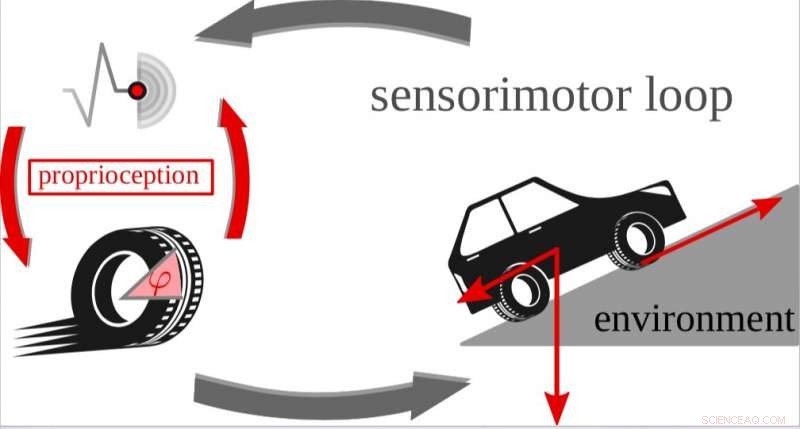
Croquis d'une boucle sensorimotrice conforme, capable de s'adapter à l'environnement. Crédit :Sándor et al.
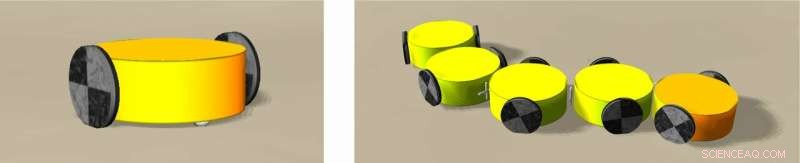
Robots simulés (une voiture, 5 voitures connectées dans un train). Crédit :Sándor et al.
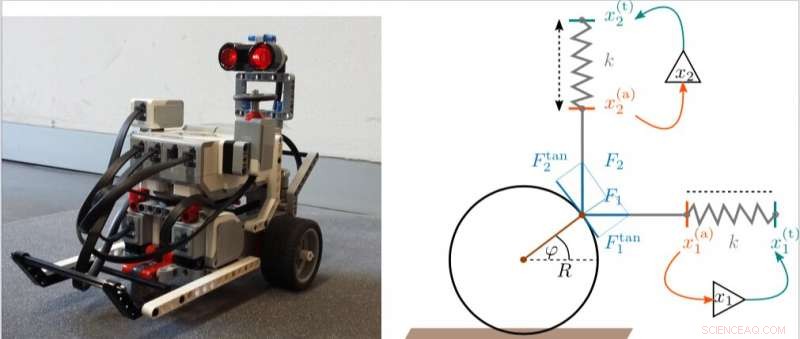
Robot Lego et le mécanisme de contrôleur que nous avons utilisé. Crédit :Sándor et al.
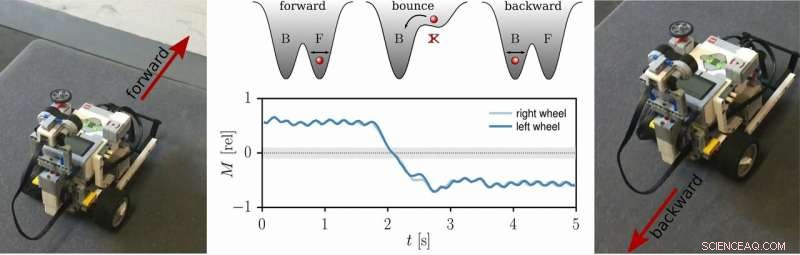
Illustrant comment le robot change de manière autonome les directions de locomotion lorsqu'il heurte un mur. Crédit :Sándor et al.
"Ne serait-ce pas beaucoup plus simple si le cerveau donnait juste un bref coup de pied et que le corps d'un animal ou d'un robot effectuait lui-même un mouvement bien coordonné ?" dit Gros. "C'est l'idée clé derrière le contrôle du coup de pied. Cela peut être réalisé, comme nous l'avons découvert, lorsque le robot dispose d'actionneurs auto-organisés."
Les chercheurs ont évalué leur cadre sur des robots à roues simulés et réels, générer indépendamment la dynamique de roues distinctes via des boucles de rétroaction locales. Ces boucles de rétroaction sont médiées par des neurones à codage de débit, qui traitent des entrées propriosensorielles décrivant l'angle de rotation réel de chaque roue. Ensuite, une tige de transmission simulée qui ressemble à celles utilisées dans les locomotives à vapeur traduit les changements d'activité neuronale en un mouvement de rotation.
« Nous démontrons comment les modèles de mouvement auto-organisés peuvent être utilisés pour générer une locomotion incarnée, " a déclaré Sándor. " L'utilisation de ce schéma de contrôle peut aider à simplifier les calculs complexes qui doivent être effectués pour effectuer diverses tâches de locomotion. La combiner avec d'autres méthodes peut conduire à des outils puissants pour générer des comportements robotiques complexes. Notre cadre pourrait également contribuer à la compréhension de la locomotion animale et humaine."
L'étude réalisée par Sándor, Gros et leurs collègues pourraient conduire à une nouvelle technique pour contrôler efficacement les mouvements des robots. Le principal avantage pratique de leur cadre est qu'il alloue une partie de la charge de calcul au corps du robot. Leur modèle pourrait également être utilisé pour enseigner les systèmes dynamiques dans les cours de physique du secondaire, car il permet des démonstrations interactives et engageantes.
Les chercheurs envisagent désormais de tester leurs algorithmes sur des architectures robotiques plus complexes, intégrant différentes modalités sensorielles dans leurs équations. Par exemple, ils pourraient appliquer le kick control à une organisation hiérarchique de contrôleurs, dans lequel l'information visuelle déclenche un mode de locomotion particulier.
« Nous travaillons actuellement à généraliser nos principes aux robots à pattes, en particulier les hexapodes, et nos premiers résultats sont prometteurs, ", a déclaré Gros. "Nous étudions également l'activation du contrôle des coups de pied par des informations sensorielles."
© 2019 Réseau Science X