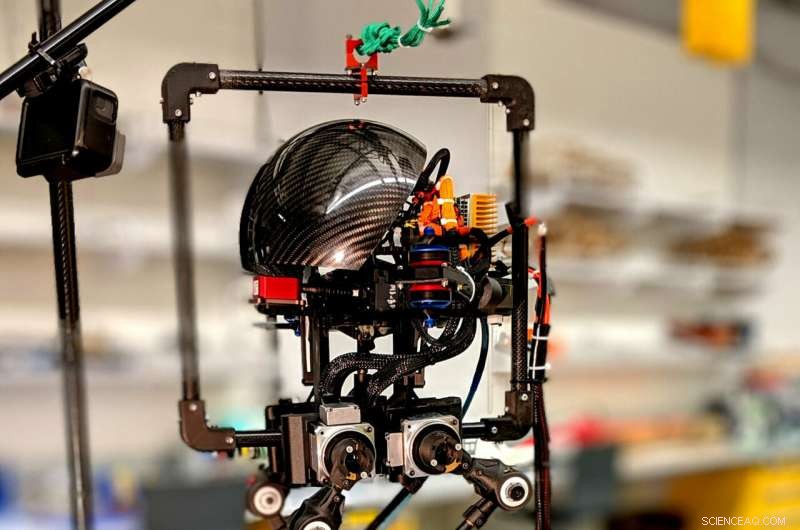
Leo mesure environ deux pieds et demi de haut, sur mince, jambes fléchies. Crédit :Alireza Ramezani, Bientôt-Jo Chung, et Morteza Gharib
Un robot bipède marche à la surface d'une planète lointaine. Ses capteurs scannent l'environnement, renvoyer des données sur Terre. Il s'agit d'une colline en ruine, fléchit les genoux et bondit, vrombissement des propulseurs, pour atterrir en toute sécurité au-dessus de la roche meuble.
Cet avenir est encore un rêve lointain, mais Alireza Ramezani, professeur adjoint de génie électrique et informatique à Northeastern, a fait un pas de plus avec son nouveau robot.
Le robot est connu sous le nom de LEONARDO, acronyme de LEg ON Aerial Robotic DrOne, ou Lion pour faire court. Il a une capacité que la plupart des robots de nos jours n'ont tout simplement pas :il peut à la fois marcher et voler.
"Initialement, il a été développé avec l'idée de concevoir des explorateurs - des systèmes qui peuvent combiner la mobilité des jambes et la mobilité aérienne rapide pour faire des explorations autonomes, ", a déclaré Ramezani.
Leo mesure environ deux pieds et demi de haut, sur mince, jambes fléchies. Avec un corps fait principalement de fibre de carbone, le robot est fort, mais ne pèse que six livres. Il a des propulseurs de chaque côté de ce que Ramezani appelle le torse. Ceux-ci sont capables de fournir une poussée dans les deux sens, et sont assez puissants pour voler. Mais ce n'est pas leur fonction première.
"L'idée n'est pas de créer un quadricoptère, " a déclaré Ramezani. " L'idée est d'avoir une machine qui peut tirer parti de ses jambes et des propulseurs pour, par exemple, améliorer sa capacité de saut."
Les propulseurs peuvent également aider à stabiliser le robot sur des surfaces inégales, ou l'attraper s'il commence à tomber.
"C'est l'enjeu majeur des systèmes à pattes, ou encore humains :nous pouvons stabiliser notre corps, mais parfois nous tombons, " dit Ramezani. " Et si nous pouvions avoir un robot qui ne tombe jamais ?
Ramezani a commencé à étudier les systèmes robotiques à pattes au cours de ses études supérieures à l'Université du Michigan. Les robots marcheurs luttent souvent sur des terrains accidentés. À l'époque, il se demandait s'il existait un moyen de déployer un airbag pour amortir un robot en chute. Maintenant, il a conçu un robot qui peut se rattraper.
L'idée est venue de l'observation des oiseaux, dit Ramezani. La plupart des conceptions robotiques se concentrent exclusivement sur un type de locomotion, mais les oiseaux savent marcher, mouche, et même courir.
"Vous pouvez voir l'ingénierie à la perfection dans la nature, et nous pouvons apprendre beaucoup, " dit Ramezani, qui a également construit un robot volant basé sur les acrobaties aériennes des chauves-souris. "Cela a été une inspiration pour moi dans presque toutes mes créations."
Lorsque Ramezani a rejoint Northeastern l'automne dernier, Leo est resté au California Institute of Technology, où Ramezani avait été chercheur postdoctoral. Il prévoit de construire une version mise à jour du robot à Boston, pour les étudiants du Nord-Est à utiliser comme plate-forme d'apprentissage.
"À ce stade, Je considère cela comme une très bonne plate-forme pour pousser la robotique agile. Pensez à un robot qui ne tombe littéralement jamais :il peut négocier un terrain accidenté, cela peut voler, cela peut sauter. Un système ultra performant, " dit Ramezani. " En bas de la route, nous pouvons utiliser une machine comme celle-ci pour l'exploration."














