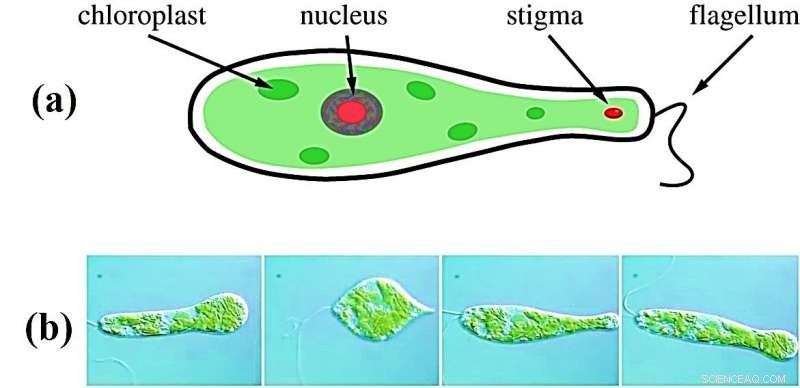
a) Illustration schématique d'un organisme euglénoïde montrant divers organismes cellulaires dont un flagelle. Image adaptée de :Robot IEE. Autom. Lett., doi:10.1109/LRA.2017.2726113, b) Séquence d'images du mouvement d'Eutreptiella spirogyra lors du mouvement euglénoïde. Images reproduites avec la permission de, Richard E. Triemer, le projet Euglenoid. Crédit :RSIF, doi:10.1098/rsif.2018.0301
La natation est une forme de locomotion utilisée par de nombreux organismes à travers un large éventail d'échelles dans la nature. Les micro-organismes de faible masse qui rencontrent la dominance des forces visqueuses dans le milieu nécessitent un changement de forme qui ne varie pas avec le temps pour obtenir une propulsion fluidique alignée sur l'hydrodynamique. Pour surmonter ce défi, les flagellés unicellulaires de la famille Euglena ont développé un mouvement caractéristique connu sous le nom de « mouvement euglénoïde » dans lequel le corps change de forme de manière significative, permettant à l'organisme de naviguer à travers des fluides visqueux et des espaces minuscules. Cette capacité à changer la forme du corps et à se déplacer dans des espaces restreints et des environnements encombrés est particulièrement intéressante dans l'ingénierie des robots biomimétiques. Des exemples d'applications de robots miniatures incluent le mouvement à travers des fluides biologiques lors de procédures médicales in vivo et la navigation à travers des décombres dans des environnements externes lors d'opérations de recherche et de sauvetage de survivants.
Inspiré des euglénoïdes, Krishna Manaswi Digumarti et ses collègues du Département d'ingénierie et de mathématiques ont présenté la conception et le développement d'EuMoBot, un robot souple multi-segment. Le robot biomimétique pourrait reproduire de grandes déformations corporelles pour la locomotion. Dans l'étude, les scientifiques ont conçu deux robots de tailles différentes pour fonctionner avec un volume interne constant. Le protocole d'ingénierie a utilisé l'hyperélasticité des chambres en élastomère remplies de fluide pour reproduire le mouvement des euglénoïdes. Des deux, le plus petit robot se déplaçait à une vitesse de 1/5 longueurs de corps par cycle, tandis que le plus gros robot se déplaçait à une vitesse de 1/10 de longueur de corps par cycle. L'étude a montré comment des robots biomimétiques mous pouvaient être utilisés pour changer de forme et reproduire le mouvement biologique, tout en agissant comme un outil pour étudier les robots biomimétiques.
Les scientifiques ont également présenté une méthode quantitative basée sur des descripteurs de Fourier elliptiques pour caractériser et comparer la forme du robot avec son homologue biologique euglénoïde. Les résultats ont montré une similitude de forme de 85 pour cent, indiquant que la technique d'ingénierie était applicable pour développer des robots miniatures. La méthode a permis aux scientifiques de comprendre l'évolution de la forme en non linéaire, des robots mous dynamiques qui n'avaient pas de forme spécifique pour être modélisés. Les résultats de l'étude sont maintenant publiés dans le Journal de la Royal Society Interface .
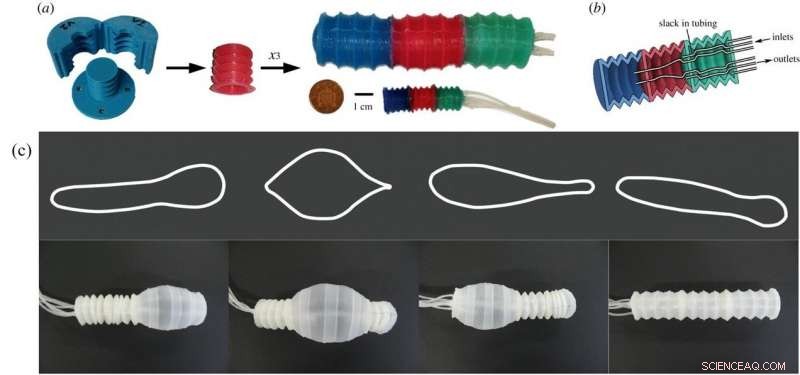
Fabrication du robot souple multi-segments par collage de trois actionneurs HEB. a) Moule imprimé en trois dimensions avec deux moitiés et un noyau utilisé pour couler l'élastomère de silicone. Au milieu :une seule chambre d'actionnement. A droite :un robot à trois segments fabriqué à deux échelles différentes. Un penny anglais illustré pour l'échelle. b) Vue en coupe transversale du robot montrant différentes chambres. Chaque chambre était équipée d'un tube d'entrée et de sortie. Un jeu suffisant fourni pour permettre la libre expansion des chambres. c) En haut :contour des formes cellulaires lors du mouvement euglénoïde. En bas :le robot mou fabriqué reproduisant la forme euglénoïde bio-inspirée. Crédit :RSIF, doi:10.1098/rsif.2018.0301.
Les stratégies d'ingénierie biomimétique ont incité les chercheurs à rechercher des conceptions du règne animal et à créer des robots d'inspiration biologique. Les euglénoïdes sont des flagellés unicellulaires, largement étudiés en laboratoire en tant que modèles en raison de leur caractère végétal et animal. Les organismes utilisent des stratégies uniques pour nager à faible nombre de Reynolds et les études sur leur locomotion sont relativement récentes. Les cellules de l'organisme sont typiquement équipées d'un ou plusieurs flagelles pour nager, tout en présentant également un deuxième type de mouvement plus lent appelé mouvement euglénoïde, dans lequel la cellule subit un changement radical de forme. Dans la présente étude, Digumarti et al. utilisé la deuxième forme de mouvement pour concevoir un doux, robot fonctionnel basé sur le comportement du micro-organisme.
La raison évolutive du changement de forme observé au cours du mouvement euglénoïde est inconnue, bien que l'on pense que la déformation de la taille des cellules est survenue en réponse à de forts stimuli tels que la lumière, Chauffer, choc chimique ou contact. Lorsque les micro-organismes ont été placés dans un labyrinthe microscopique rempli de fluide ressemblant à leur environnement naturel, beaucoup ont montré un mouvement euglénoïde, suggérant que le mouvement était bien adapté aux environnements contraints. Un mouvement de cette nature peut être utile pour un robot bio-inspiré dans le domaine de la robotique douce pour traverser des environnements encombrés en utilisant des déformations de gros corps.
Dans l'étude, les auteurs ont présenté le design, principe d'actionnement et méthode de fabrication pour concevoir EuMoBot, un robot mou démontrant le mouvement euglénoïde. La locomotion à travers un fluide a été quantifiée par rapport au mouvement naturel du micro-organisme. Étant donné que les mécanismes sous-jacents du changement de forme ont été précédemment étudiés en détail, Digumarti et al. se sont concentrés sur la forme macroscopique de l'euglénoïde sous forme robotique sans reproduire les changements au niveau microscopique. Pour générer des actionneurs fluidiques souples, les chercheurs ont conçu un nouveau dispositif semblable à un soufflet appelé actionneur à «soufflet hyper-élastique» (HEB), tel que détaillé précédemment par le même groupe de recherche.

a) Démontrer la conformité du robot lorsqu'il se dilate entre des vis rigides. b) Séquence d'images au début et à la fin d'un cycle de locomotion sur une table plate. c) Robot grimpant à l'intérieur d'un tuyau en utilisant une démarche de type vis sans fin. Crédit :RSIF, doi:10.1098/rsif.2018.0301.
Les ingénieurs ont formé la forme de l'actionneur à l'aide d'un moule imprimé en 3D. Ils ont fabriqué deux robots de tailles différentes. Ils ont coulé trois chambres d'actionneur, suivi d'un mélange d'élastomère avec des pigments injectés dans le moule pour durcir pendant la nuit et former une enceinte blanche translucide. Le robot doux bio-inspiré contenait une chambre de gonflage/dégonflage pour reproduire la forme euglénoïde et obtenir une similitude de mouvement.
Pour tester la locomotion des robots d'ingénierie, les chercheurs les ont placés dans un réservoir rempli d'une solution de méthylcellulose dans l'eau. Les robots de chaque expérience avaient un volume intérieur constant, et leur fluide interne déplacé d'une chambre à l'autre, reproduire le mouvement d'une onde d'expansion caractéristique des euglénoïdes. Les deux robots ont montré leur capacité à nager en changeant la forme de leur corps. La disparité de vitesse dépendait du volume de fluide pompé à travers les chambres du robot mou. Les scientifiques ont observé la similitude hydrodynamique entre le robot mou et le micro-organisme par rapport aux nombres de Reynold aux deux tailles. Le robot doux ne se limitait pas seulement à travailler dans un environnement fluide comme son homologue biologique, avec capacité de déplacement multimodal sur une table plate et escalade d'un tuyau en utilisant un volume de fonctionnement non constant.
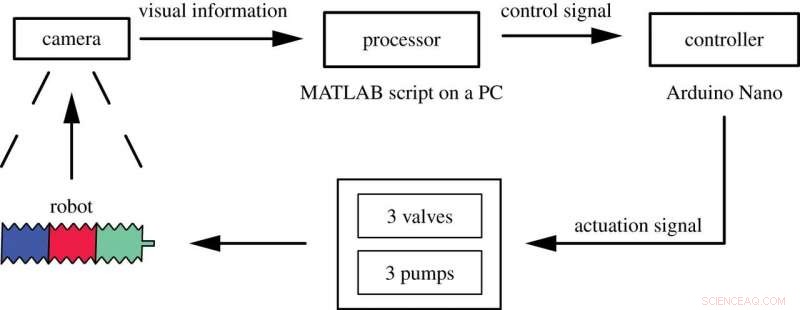
Vue schématique de l'architecture de contrôle du robot logiciel. Une caméra est utilisée pour déterminer l'état actuel du robot. Un script MATLAB traite ces informations pour déterminer l'état actuel du robot, qui comprend l'expansion et la contraction de chaque chambre. Il passe ensuite par les signaux de contrôle appropriés à un Arduino, qui contrôle le fonctionnement des pompes et des vannes pour diriger le flux de fluide à l'intérieur du robot. Crédit :RSIF, doi:10.1098/rsif.2018.0301.
Le robot utilise une approche basée sur la rétroaction pour un contrôle autonome, éliminant le besoin de modéliser la dynamique de la pompe et l'écoulement du fluide dans le robot. Une estimation par vision artificielle de la taille de la chambre via une caméra et un script MATLAB a fourni des commentaires. Le système utilisait l'expansion et la contraction de chaque chambre pour contrôler le flux de fluide à l'intérieur du robot. Des capteurs à l'intérieur du robot ont permis des mesures directes de la pression du fluide.
L'estimation de la forme du robot a été réalisée avec des descripteurs mathématiques extraits à l'aide d'enregistrements vidéo précédents de l'organisme. Les scientifiques ont utilisé le descripteur de Fourier elliptique pour les contours fermés pour décrire la forme d'un robot souple hyper-élastique et l'ont comparé à un organisme biologique pour la première fois dans l'étude. Le descripteur de Fourier elliptique a été extrait en quatre étapes principales pour estimer la forme de l'objet. La quantité de variance dans la forme capturée par un vecteur propre a été utilisée pour mesurer quantitativement la similitude de forme entre le robot et l'organisme. La forme des euglénoïdes était distinctement caractérisée par les trois premiers composants principaux, tandis que la variance dans les robots était répartie sur plus de composants, suggérant que les formes extrêmes des euglénoïdes n'étaient pas entièrement reproduites dans les robots.
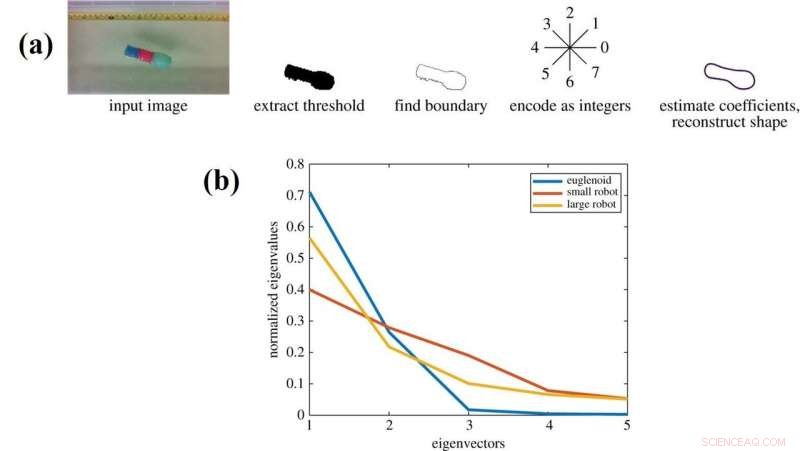
a) Les quatre étapes de l'estimation de forme. Tout d'abord, la région d'intérêt est extraite de l'image. Prochain, la limite est identifiée. Ce contour est ensuite codé comme un ensemble d'entiers de Freeman. Finalement, un jeu de coefficients de Fourier est calculé, et forme reconstituée. b) Valeurs propres normalisées des cinq premiers vecteurs propres décrivant la forme des robots mous par rapport à l'euglénoïde. Crédit :RSIF, doi:10.1098/rsif.2018.0301.
Sur la base des valeurs propres, les robots plus gros reproduisaient des formes plus proches de l'euglénoïde par rapport aux robots plus petits. La raison de la différence observée peut être due à la conception des plis du soufflet (soufflet hyper-élastique - HEBs). Paramètres des angles de pliage, leur nombre et leur densité peuvent être encore optimisés pour obtenir une meilleure réplication de forme. Par rapport aux micro-organismes naturels, le robot n'a pas produit un changement en douceur lors de la transition du fluide d'une chambre à l'autre, potentiellement puisque la paroi synthétique, malgré son élasticité, peut restreindre localement l'expansion de la chambre. Cela peut aussi expliquer l'incapacité du robot à prendre des formes extrêmes.
Dans son ensemble, le robot souple multi-segments EuMoBot peut reproduire le mouvement euglénoïde en plus de la nage avec changement de forme et de la locomotion dans des environnements non fluides, permettant au robot doux et complaisant de fonctionner dans des espaces restreints. Des travaux supplémentaires sont nécessaires pour comprendre la relation entre les composants principaux et la capacité de locomotion. L'extrémité des formes présentées par les EuMoBots était limitée en raison de la résistance à la traction du matériau associé et de la conception monolithique de son dispositif. Des techniques de fabrication alternatives telles que l'impression 3D et la lithographie douce pourraient aborder les limites de l'élasticité des matériaux. Les robots pourraient également être conçus pour ressembler à des euglénoïdes avec une précision mathématique en reproduisant la structure microscopique de la pellicule inhérente à l'organisme pour une transition plus douce pendant la locomotion. La capacité de diriger peut être incluse dans la conception du robot avec des bobines actionnées en alliage à mémoire de forme ou en utilisant des contraintes sur le matériau avec des sources d'énergie intériorisées pour une résistance, dispositifs miniaturisés dans les travaux futurs.
© 2018 Réseau Science X