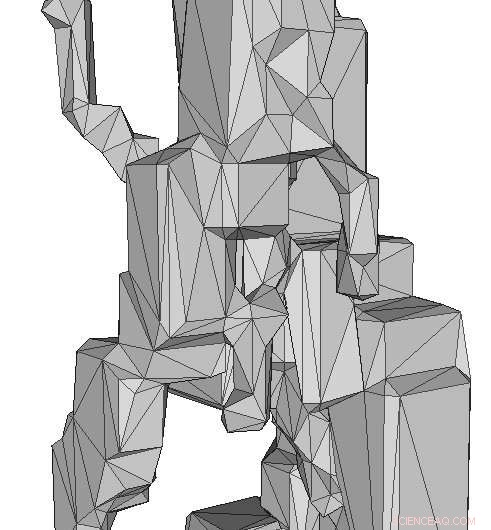
Pattes attachées à l'un des hexapodes des chercheurs. Crédit :Collins et al.
Des chercheurs du CSIRO et de l'Université de technologie du Queensland ont récemment mené une étude visant à faire évoluer automatiquement la structure physique des robots pour améliorer leurs performances dans différents environnements. Ce projet, financé par l'Active Integrated Matter Future Science Platform du CSIRO, a été conçu par David Howard, chercheur au sein du Groupe Robotique et Systèmes Autonomes (RASG) de Data61.
« Le RASG se concentre sur la robotique de terrain, ce qui signifie que nous avons besoin de nos robots pour aller dans des endroits éloignés et effectuer des missions dans des conditions défavorables, conditions environnementales difficiles, " David Howard a déclaré à TechXplore. " La recherche est née d'une opportunité identifiée, car RASG utilise largement l'impression 3D pour construire et personnaliser nos robots. Cette recherche démontre un algorithme de conception qui peut générer automatiquement des composants imprimables en 3D afin que nos robots soient mieux équipés pour fonctionner dans différents environnements. »
L'objectif principal de l'étude était de générer automatiquement des composants pouvant améliorer les performances d'un robot en fonction de l'environnement, avec des contraintes minimales sur l'apparence de ces composants. Les chercheurs se sont particulièrement intéressés aux pattes d'un robot hexapode (6 pattes), qui peut être déployé dans une variété d'environnements, y compris les milieux industriels, forêts tropicales, et plages.
"Les pieds sont facilement convertibles en fichiers imprimables en 3D, afin que nous puissions facilement imprimer les pattes et les clipser sur nos hexapodes pour le déploiement, ", a déclaré Howard. "Nous avons émis l'hypothèse que changer la forme des jambes nous donnerait des performances différentes et l'article décrit une première démonstration de cette capacité. Nous nous sommes inspirés de la force créatrice la plus puissante de la planète, celui qui crée encore et encore des formes qui fonctionnent dans des conditions environnementales parfois très difficiles :l'évolution."
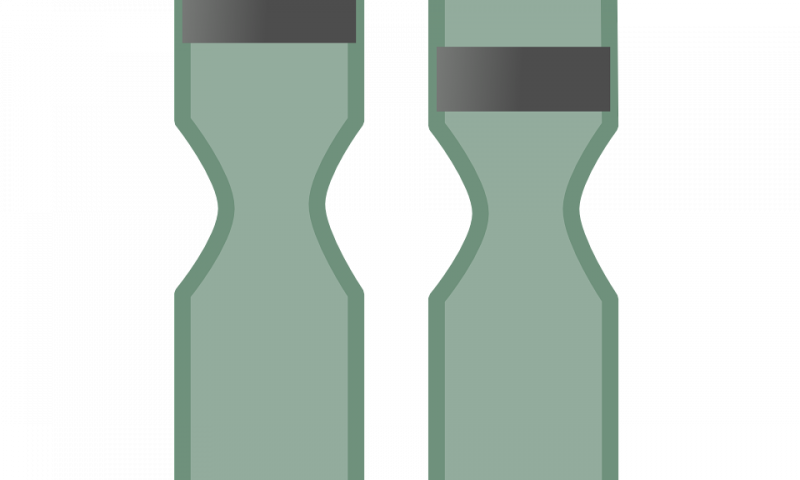
Un pied optimisé pour les sols durs. Crédit :Collins et al.
Le système développé par Howard et ses collègues utilise un algorithme génétique pour optimiser les collections de splines de Bézier (versions 3D de l'outil 'courbe' sur Microsoft Paint), définissant la forme du tibia du robot. Les conceptions des jambes candidates sont optimisées en fonction de leur adéquation à un environnement particulier. Dans leur étude, cette optimisation était basée sur une fonction de l'énergie nécessaire pour traverser un environnement et de la quantité de matériau nécessaire pour créer la jambe.
"Nous partons d'une population de jambes aléatoires, les évaluer dans un environnement simulé haute fidélité (gravier, la terre dure et l'eau étaient celles sur lesquelles nous nous sommes concentrés) et obtenir leurs scores de condition physique, ", a expliqué Howard. "Ces scores sont utilisés pour mettre en œuvre un processus de sélection de « survie du plus apte », afin que les bonnes jambes soient conservées et que les mauvaises jambes soient « tuées ». Les bonnes jambes ont alors une chance de se reproduire, en utilisant des analogues de croisement, dans lequel une jambe enfant a les caractéristiques de deux jambes parentes, et par mutation, où les caractéristiques des formes sont modifiées au hasard."
Cette approche permet à l'algorithme de rechercher les bonnes formes à appliquer sur les jambes du robot, dans un espace de solutions possibles. Les chercheurs ont généré un certain nombre de jambes d'enfants, puis les ont «concurrencés» avec les jambes des parents pour déterminer laquelle serait incluse dans la prochaine génération. La forme des jambes du robot a été automatiquement optimisée dans le temps, après des centaines de telles générations.
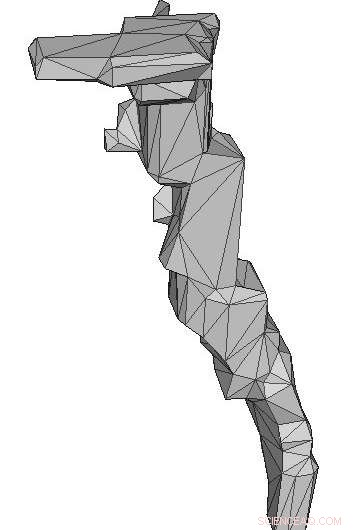
Une jambe optimisée pour les surfaces de gravier. Crédit :Collins et al.
« Nous avons pu montrer une spécialisation environnementale dans les populations de pattes, " Howard a dit. " Ils ont automatiquement évolué de sorte que, par exemple, des empreintes de pas plus grandes ont toujours été observées dans les jambes évoluées pour marcher dans le gravier, car cela empêche la jambe de glisser dans le gravier et de se coincer, ou dépenser une énergie excessive pour retirer la jambe. En sol dur, d'autre part, les jambes sont devenues plus minces car il n'y avait aucune pénalité à avoir une empreinte plus petite. "
Les chercheurs ont découvert que les jambes produites étaient en effet "nichées, ' dans un sens évolutif. En d'autres termes, la forme des jambes variait considérablement, car ils avaient évolué pour mieux fonctionner dans différents environnements.
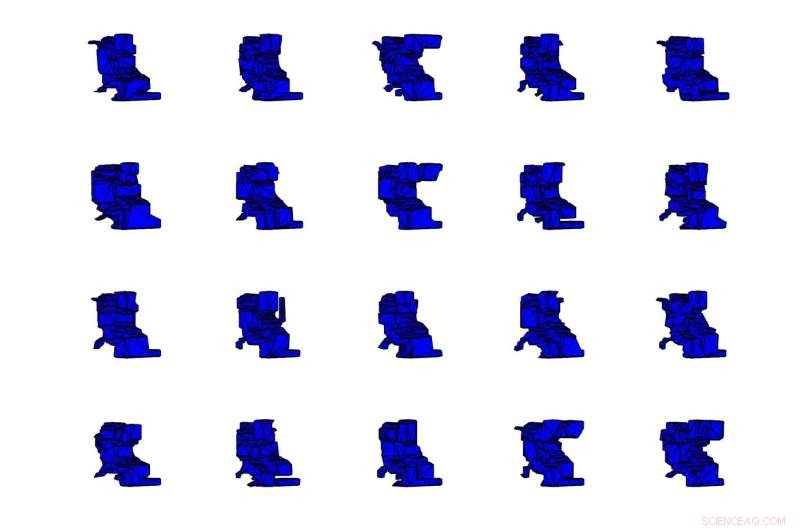
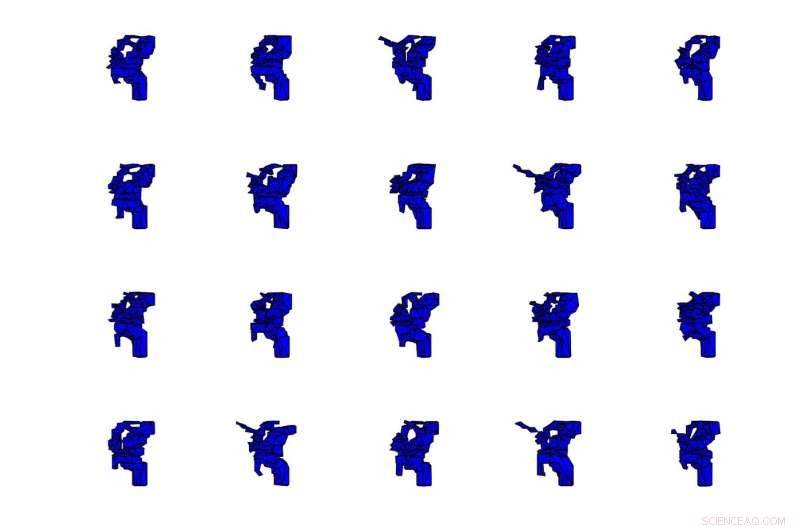
L'image montre ce qui se passe lorsque nous mutons une jambe - notez qu'elles sont toutes un peu différentes. Cela est dû à la mutation «génétique» que nous effectuons sur les courbes de Bézier. Certaines de ces variations seront bénéfiques et d'autres préjudiciables, parce que nous sélectionnons en fonction de l'aptitude, les mutations les plus bénéfiques sont susceptibles d'être préservées. Crédit :Collins et al.
L'image montre ce qui se passe lorsque nous mutons une jambe - notez qu'elles sont toutes un peu différentes. Cela est dû à la mutation «génétique» que nous effectuons sur les courbes de Bézier. Certaines de ces variations seront bénéfiques et d'autres préjudiciables, parce que nous sélectionnons en fonction de l'aptitude, les mutations les plus bénéfiques sont susceptibles d'être préservées. Crédit :Collins et al.
« Côté performances, trop, une jambe optimale pour un environnement n'était pas aussi optimale dans d'autres environnements, ", a déclaré Howard. "C'est important car cela montre que notre algorithme crée des formes spécifiques à l'environnement."
L'étude menée par Howard et ses collègues pourrait être une première étape importante vers le développement de robots les mieux équipés pour fonctionner dans différents environnements environnementaux. Jusque là, ils n'ont évalué les jambes générées que dans des simulations. Avant de pouvoir être déployés, donc, les chercheurs devront tester leurs conceptions dans le monde réel et prouver qu'elles fonctionnent mieux que les jambes conventionnelles.

Pattes attachées à l'un des hexapodes des chercheurs. Crédit :Collins et al.
« Nous voulons également envisager d'utiliser l'évolution pour sélectionner différents types de matériaux dans les jambes, " a déclaré Howard. " Nous pouvons utiliser l'impression 3D multi-matériaux pour créer des jambes faites avec différents types de matériaux, qui, nous l'espérons, améliorera encore la capacité des jambes à bien fonctionner dans différents environnements. Nous avons également commencé à utiliser des représentations plus complexes pour les formes des jambes, dans ce cas, réseaux de neurones appelés réseaux de production de motifs de composition, qui peut spécifier la forme et les propriétés matérielles des jambes sans être limité aux géométries de type Bézier. »
© 2018 Tech Xplore