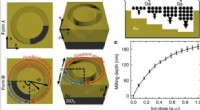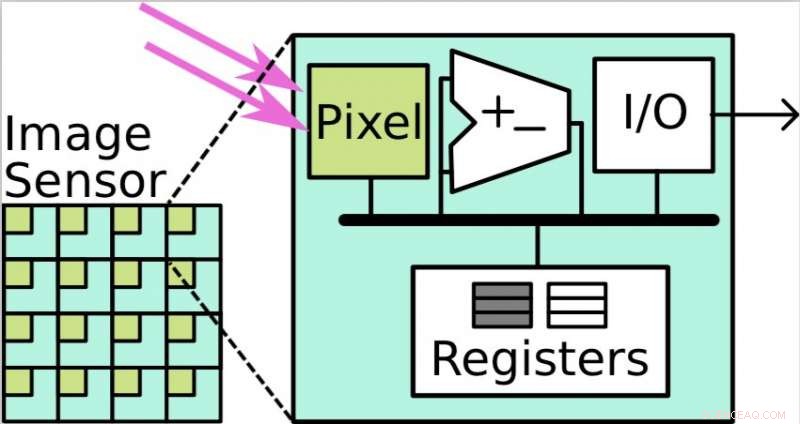
Les réseaux capteurs-processeurs à plan focal (FPSP) sont des systèmes de traitement parallèles, où chaque pixel a un élément de traitement. Crédit :Saeedi et al.
Un grand groupe de chercheurs de l'Imperial College de Londres, l'Université d'Édimbourg, l'Université de Manchester, et l'Université de Stanford ont récemment collaboré à un projet explorant l'application d'outils de localisation et de cartographie en temps réel pour la robotique, véhicules autonomes, réalité virtuelle (VR) et réalité augmentée (AR). Leur papier, publié sur arXiv et Actes de l'IEEE , décrit le développement de méthodes pour évaluer les algorithmes de localisation et de cartographie simultanées (SLAM), ainsi qu'un certain nombre d'autres outils intéressants.
"L'objectif de notre travail était d'amener des chercheurs experts de la vision par ordinateur, communautés de matériel et de compilateurs ensemble pour construire de futurs systèmes pour la robotique, VR/AR, et l'Internet des objets (IoT), " les chercheurs ont déclaré à Tech Xplore dans un e-mail. " Nous voulions construire des systèmes de vision par ordinateur robustes capables de percevoir le monde avec un budget de puissance très faible mais avec la précision souhaitée; nous nous intéressons à la perception par métrique Joule."
Les chercheurs impliqués dans le projet ont combiné leurs compétences et leur expertise pour assembler des algorithmes, architecturaux, outils, et les logiciels nécessaires pour fournir le SLAM. Leurs résultats pourraient aider ceux qui appliquent le SLAM dans divers domaines à sélectionner et configurer des algorithmes et du matériel pouvant atteindre des niveaux de performances optimaux, précision, et la consommation d'énergie.
"Un point important du projet est l'idée de recherche interdisciplinaire :réunir des experts de différents domaines peut permettre des résultats qui ne seraient pas possibles autrement, ", ont déclaré les chercheurs.
Les algorithmes SLAM sont des méthodes qui peuvent construire ou mettre à jour une carte d'un environnement inconnu tout en gardant une trace de l'emplacement d'un agent particulier dans celui-ci. Cette technologie peut avoir des applications utiles dans de nombreux domaines, par exemple dans le développement de véhicules autonomes, robotique, RV, et AR.
Dans leur étude, les chercheurs ont développé et évalué plusieurs outils, y compris les systèmes logiciels de compilation et d'exécution, ainsi que des architectures matérielles et des algorithmes de vision par ordinateur pour le SLAM. Par exemple, ils ont développé des outils d'analyse comparative qui leur ont permis de sélectionner un ensemble de données approprié et de l'utiliser pour évaluer les algorithmes SLAM.
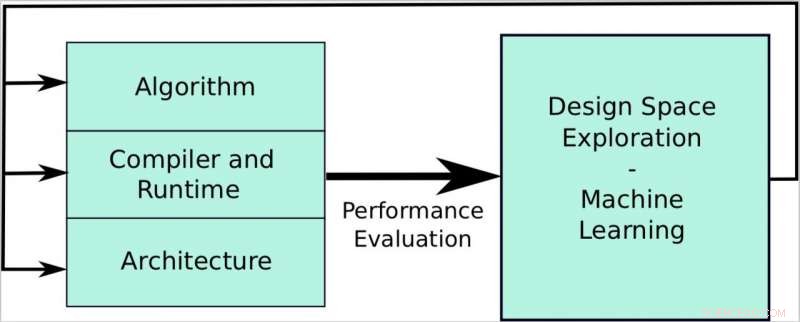
L'objectif de l'article est de créer un pipeline qui aligne les exigences de vision par ordinateur avec les capacités matérielles. L'article se concentre sur trois couches :les algorithmes, compilateur et runtime, et architecturaux. L'objectif est de développer un système qui nous permet d'atteindre l'efficacité énergétique et énergétique, amélioration de la vitesse et de la durée d'exécution, et la précision/la robustesse à chaque couche et également de manière holistique grâce à l'exploration de l'espace de conception et aux techniques d'apprentissage automatique. Crédit :Saeedi et al.
Par exemple, ils ont utilisé une application appelée SLAMBench pour évaluer l'algorithme KinectFusion sur plusieurs plates-formes matérielles et SLAMBench2 pour comparer différents algorithmes SLAM. Les chercheurs ont également étendu l'algorithme KinectFusion, afin qu'il puisse être utilisé dans des algorithmes de planification de trajectoire et de navigation robotiques ; cartographie à la fois l'espace occupé et l'espace libre dans l'environnement.
"Ce projet était vraiment vaste, Donc, les découvertes étaient assez nombreuses, " les chercheurs ont dit. "Par exemple, nous avons montré des applications pratiques où le calcul approximatif peut jouer un rôle important dans l'obtention de la perception par Joule, par exemple l'application SLAMBench développée pour les smartphones. Le calcul approximatif est l'idée de terminer une tâche de calcul avec une erreur acceptable donnée, et ainsi produire une solution approximative."
Le projet a exploré l'utilisation de nouvelles technologies de détection, tels que les réseaux de capteurs-processeurs à plan focal, qui se sont avérés avoir une faible consommation d'énergie et des fréquences d'images élevées. En outre, il a étudié l'application de la statique, dynamique, et les approches hybrides d'ordonnancement de programmes sur des systèmes multicœurs, en particulier pour l'algorithme KinectFusion.
« Nos recherches ont déjà un impact sur de nombreux domaines comme la robotique, VR/AR, et IoT, où les machines sont toujours allumées et sont capables de communiquer et d'effectuer leurs tâches avec une précision raisonnable, sans interruption, à très faible consommation d'énergie, ", ont déclaré les chercheurs.
Ce projet global a conduit à plusieurs découvertes importantes, et au développement de nouveaux outils qui pourraient grandement faciliter la mise en œuvre du SLAM en robotique, RV, AR, et véhicules autonomes.
L'étude a également apporté un certain nombre de contributions dans le contexte de la conception du matériel, par exemple, développer des outils de profilage pour localiser et évaluer les goulots d'étranglement des performances dans les applications natives et gérées. Les chercheurs ont présenté un flux de travail complet pour la création de matériel pour les applications de vision par ordinateur, qui pourraient être appliqués aux futures plateformes.
"Nous allons maintenant utiliser nos découvertes pour construire un système intégré pour la robotique et la VR/AR, " les chercheurs ont dit. " Par exemple, Le Dr Luigi Nardi de l'Université de Stanford poursuit ses recherches en appliquant des concepts similaires aux réseaux de neurones profonds (DNN), c'est-à-dire en optimisant le matériel et les logiciels pour exécuter DNN efficacement, tandis que le Dr Sajad Saeedi de l'Imperial College de Londres étudie des technologies analogiques alternatives telles que les réseaux de capteurs-processeurs à plan focal (FPSP) qui permettent à DNN de fonctionner à des fréquences d'images très élevées, ordre de 1000s FPS, pour les appareils connectés en permanence et les voitures autonomes."
© 2018 Tech Xplore