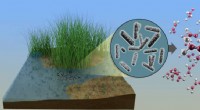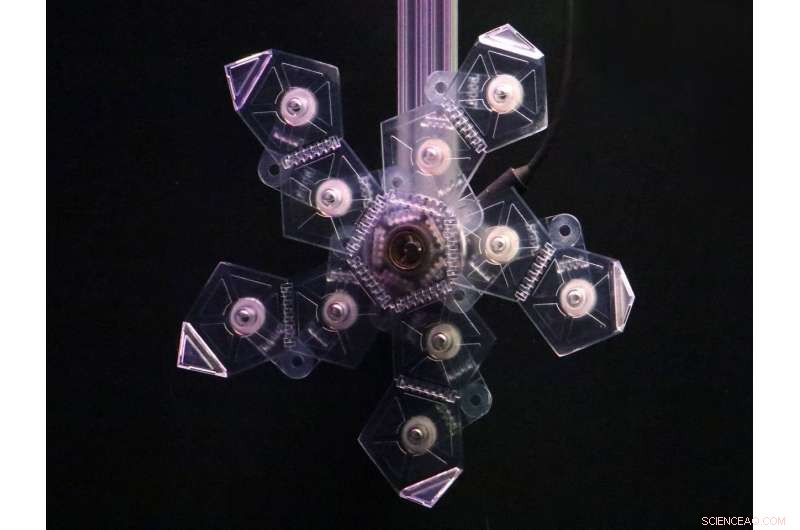
Le RAD se déploie. Crédit :Institut Wyss de l'Université Harvard
L'océan ouvert est l'environnement le plus vaste et le moins exploré de la Terre, On estime qu'il abrite jusqu'à un million d'espèces qui n'ont pas encore été décrites. Cependant, beaucoup de ces organismes ont un corps mou, comme les méduses, calamar, et les poulpes - et sont difficiles à capturer pour l'étude avec les outils sous-marins existants, qui trop fréquemment les endommagent ou les détruisent. Maintenant, un nouvel appareil développé par des chercheurs du Wyss Institute de l'Université Harvard, École d'ingénierie et de sciences appliquées John A. Paulson (SEAS), et Radcliffe Institute for Advanced Study piège en toute sécurité des créatures marines délicates à l'intérieur d'une enceinte polyédrique pliante et les laisse partir sans danger à l'aide d'un roman, design inspiré de l'origami. La recherche est rapportée dans Robotique scientifique .
« Nous abordons ces animaux comme s'il s'agissait d'œuvres d'art :découperions-nous des morceaux de la Joconde pour l'étudier ? Non, nous utiliserions les outils les plus innovants disponibles. Ces organismes des grands fonds, certains ont des milliers d'années, méritent d'être traités avec la même douceur lorsque nous interagissons avec eux, " a déclaré l'auteur collaborateur David Gruber, Doctorat., qui est un Radcliffe Fellow 2017-2018, Explorateur National Geographic, et professeur de biologie et de sciences de l'environnement au Baruch College, CUNY.
L'idée d'appliquer des propriétés de pliage à la collecte d'échantillons sous-marins a commencé en 2014 lorsque le premier auteur Zhi Ern Teoh, doctorat pris un cours de Chuck Hoberman, MME., un membre associé du corps professoral de Wyss et professeur Pierce Anderson en ingénierie de conception à la Harvard Graduate School of Design, sur la création de mécanismes de pliage par des moyens informatiques. "Je construisais des microrobots à la main à l'école doctorale, ce qui était un travail très laborieux et fastidieux, et je me suis demandé s'il existait un moyen de plier une surface plane en une forme tridimensionnelle à l'aide d'un moteur à la place, " dit Teoh, un ancien boursier postdoctoral Wyss dans le laboratoire de Robert Wood, Doctorat., qui est maintenant ingénieur chez Cooper Perkins.