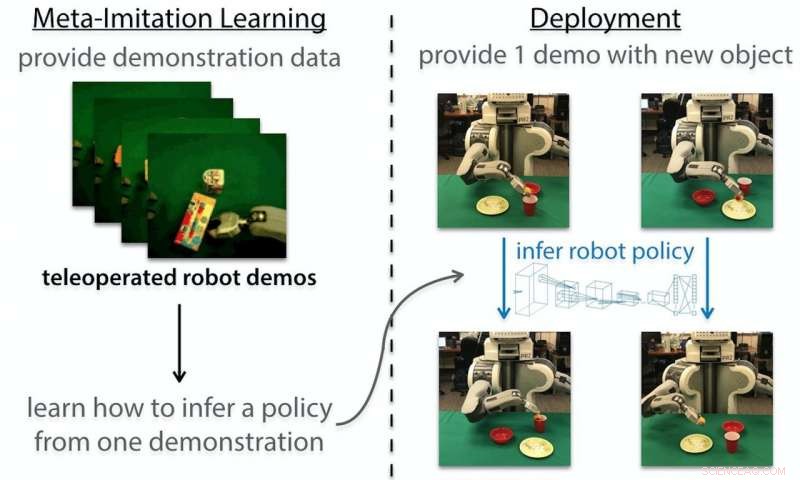
Trois étapes pour notre algorithme de méta-apprentissage. Crédit :Tianhe Yu et Chelsea Finn
Une équipe de chercheurs de l'UC Berkeley a trouvé un moyen d'amener un robot à imiter une activité qu'il voit sur un écran vidéo une seule fois. Dans un article qu'ils ont téléchargé sur le arXiv serveur de préimpression, l'équipe décrit l'approche utilisée et son fonctionnement.
Les robots qui apprennent à faire des choses simplement en regardant un humain effectuer une action une seule fois seraient capables d'apprendre beaucoup plus de nouvelles actions beaucoup plus rapidement qu'il n'est actuellement possible. Les scientifiques ont travaillé dur pour trouver comment y arriver.
Historiquement pourtant, les robots ont été programmés pour effectuer des actions telles que ramasser un objet via un code qui énonce expressément ce qui doit être fait et comment. C'est ainsi que la plupart des robots qui font des choses comme assembler des voitures dans une usine fonctionnent. De tels robots doivent encore suivre un processus de formation par lequel ils sont guidés à travers des procédures plusieurs fois jusqu'à ce qu'ils soient capables de les faire sans commettre d'erreurs. Plus récemment, les robots ont été programmés pour apprendre uniquement par l'observation, un peu comme le font les humains et les autres animaux. Mais un tel apprentissage imitatif nécessite généralement des milliers d'observations. Dans ce nouvel effort, les chercheurs décrivent une technique qu'ils ont développée qui permet à un robot d'effectuer une action souhaitée en regardant un être humain le faire une seule fois.
Pour accomplir cet exploit, les chercheurs ont combiné l'apprentissage par imitation avec un algorithme de méta-apprentissage. Le résultat est ce qu'ils appellent le méta-apprentissage indépendant du modèle (MAML). Méta-apprentissage, expliquent les chercheurs, est un processus par lequel un robot apprend en incorporant une expérience antérieure. Si un robot voit une vidéo d'un humain ramassant une poire ou un autre objet similaire, par exemple, et le mettre dans une tasse, bol ou autre objet, il peut avoir une "sensation" pour un objectif. Si dans chaque cas on apprend à imiter le comportement d'une certaine manière, puis il « apprend » quoi faire lorsqu'il observe d'autres comportements similaires. Ainsi, quand il voit une vidéo d'une personne ramassant une prune et la mettant dans un bol, il reconnaît le comportement et est capable de le traduire en un comportement similaire qui lui est propre, qu'il peut alors effectuer.
© 2018 Tech Xplore