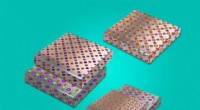
Grabber MIT Spiderlike (structure hexapédale) (Avant) Crédit :Yoonho Kim &Xuanhe Zhao
Les ingénieurs du MIT ont créé des logiciels, Des structures imprimées en 3D dont les mouvements peuvent être contrôlés par une vague d'aimant, un peu comme des marionnettes sans les ficelles.
La ménagerie de structures manipulables magnétiquement comprend un anneau lisse qui se plisse, un long tube qui se ferme, un drap qui se plie, et un "grabber" en forme d'araignée qui peut ramper, rouler, saut, et s'assembler assez rapidement pour attraper une balle qui passe. Il peut même être dirigé pour s'enrouler autour d'une petite pilule et la transporter sur une table.
Les chercheurs ont fabriqué chaque structure à partir d'un nouveau type d'encre imprimable en 3D qu'ils ont infusée de minuscules particules magnétiques. Ils ont installé un électro-aimant autour de la buse d'une imprimante 3D, ce qui a fait basculer les particules magnétiques dans une seule orientation lorsque l'encre a été alimentée à travers la buse. En contrôlant l'orientation magnétique des sections individuelles de la structure, les chercheurs peuvent produire des structures et des dispositifs qui peuvent presque instantanément se transformer en formations complexes, et même se déplacer, car les différentes sections répondent à un champ magnétique externe.
Xuanhe Zhao, le professeur de développement de carrière Noyce au département de génie mécanique et au département de génie civil et environnemental du MIT, dit que la technique du groupe peut être utilisée pour fabriquer des dispositifs biomédicaux à commande magnétique.
"Nous pensons qu'en biomédecine cette technique trouvera des applications prometteuses, " dit Zhao. "Par exemple, nous pourrions mettre une structure autour d'un vaisseau sanguin pour contrôler le pompage du sang, ou utiliser un aimant pour guider un appareil dans le tractus gastro-intestinal pour prendre des images, extraire des échantillons de tissus, dégager un blocage, ou livrer certains médicaments à un endroit précis. Vous pouvez concevoir, simuler, puis il suffit d'imprimer pour obtenir diverses fonctions."
Zhao et ses collègues ont publié leurs résultats aujourd'hui dans la revue La nature . Ses co-auteurs incluent Yoonho Kim, Hyunwoo Yuk, et Ruike Zhao du MIT, et Shawn Chester du New Jersey Institute of Technology.
Un champ mouvant
Les structures activées magnétiquement de l'équipe relèvent de la catégorie générale des dispositifs à actionnement doux :spongieux, des matériaux moulables conçus pour changer de forme ou se déplacer par divers moyens mécaniques. Par exemple, les appareils à hydrogel gonflent lorsque la température ou le pH changent; les polymères à mémoire de forme et les élastomères à cristaux liquides se déforment avec des stimuli suffisants tels que la chaleur ou la lumière; les dispositifs pneumatiques et hydrauliques peuvent être actionnés par de l'air ou de l'eau pompés dedans ; et les élastomères diélectriques s'étirent sous des tensions électriques.
Mais les hydrogels, polymères à mémoire de forme, et les élastomères à cristaux liquides sont lents à réagir, et changer de forme au cours des minutes aux heures. Les appareils à air et à eau nécessitent des tubes qui les relient aux pompes, ce qui les rend inefficaces pour les applications télécommandées. Les élastomères diélectriques nécessitent des tensions élevées, généralement au-dessus de mille volts.
"Il n'y a pas de candidat idéal pour un robot mou qui peut fonctionner dans un espace clos comme un corps humain, où vous voudriez effectuer certaines tâches sans être attaché, " dit Kim. " C'est pourquoi nous pensons qu'il y a une grande promesse dans cette idée d'actionnement magnétique, car c'est rapide, énergique, corps-bénigne, et peut être contrôlé à distance."
D'autres groupes ont fabriqué des matériaux activés magnétiquement, bien que les mouvements qu'ils ont accomplis aient été relativement simples. Pour la plupart, les chercheurs mélangent une solution polymère avec des billes magnétiques, et verser le mélange dans un moule. Une fois le matériau durci, ils appliquent un champ magnétique pour magnétiser uniformément les billes, avant de retirer la structure du moule.
"Les gens n'ont fait que des structures qui s'allongent, rétrécir, ou plier, " Yuk dit. " Le défi est, comment concevez-vous une structure ou un robot qui peut effectuer des tâches beaucoup plus compliquées ?"
Jeu de domaine
Au lieu de faire des structures avec des particules magnétiques de la même, orientation uniforme, l'équipe a cherché des moyens de créer des "domaines" magnétiques - des sections individuelles d'une structure, chacun avec une orientation distincte des particules magnétiques. Lorsqu'il est exposé à un champ magnétique externe, chaque section doit se déplacer d'une manière distincte, selon la direction dans laquelle ses particules se déplacent en réponse au champ magnétique. De cette façon, le groupe a supposé que les structures devraient effectuer des articulations et des mouvements plus complexes.
Avec leur nouvelle plateforme d'impression 3D, les chercheurs peuvent imprimer des sections, ou domaines, d'une structure, et régler l'orientation des particules magnétiques dans un domaine particulier en changeant la direction de l'électroaimant encerclant la buse de l'imprimante, que le domaine est imprimé.
L'équipe a également développé un modèle physique qui prédit comment une structure imprimée se déformera sous un champ magnétique. Compte tenu de l'élasticité du matériau imprimé, le modèle de domaines dans une structure, et la manière dont un champ magnétique externe est appliqué, le modèle peut prédire la façon dont une structure globale se déformera ou se déplacera. Ruike a découvert que les prédictions du modèle correspondaient étroitement aux expériences menées par l'équipe avec un certain nombre de structures imprimées différentes.
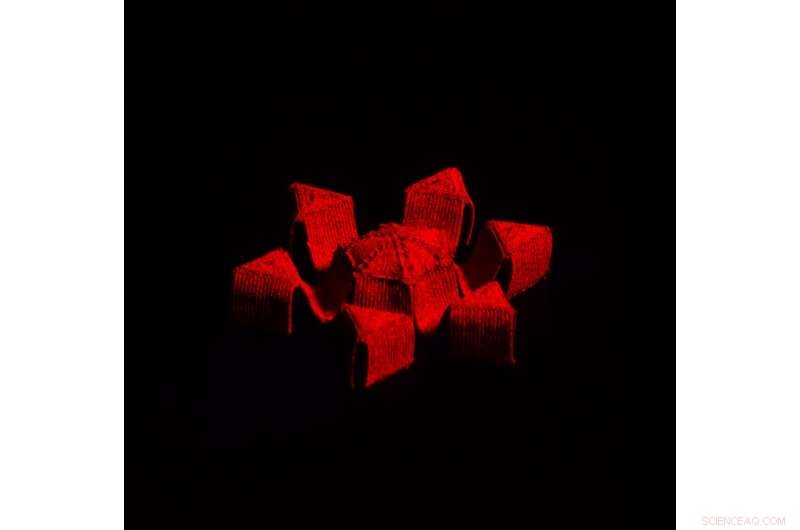
Grabber MIT Spiderlike (structure hexapédale) (Après) Crédit :Yoonho Kim &Xuanhe Zhao
En plus d'un anneau ondulant, un tube auto-presseur, et une pince en forme d'araignée, l'équipe a imprimé d'autres structures complexes, comme un ensemble de structures "auxétiques" qui rétrécissent ou s'étendent rapidement dans deux directions. Zhao et ses collègues ont également imprimé un anneau incrusté de circuits électriques et de lumières LED rouges et vertes. Selon l'orientation d'un champ magnétique externe, la bague se déforme pour s'allumer soit en rouge soit en vert, de manière programmée.
« Nous avons développé une plate-forme d'impression et un modèle prédictif que d'autres peuvent utiliser. Les gens peuvent concevoir leurs propres structures et modèles de domaine, les valider avec le modèle, et les imprimer pour actionner diverses fonctions, " dit Zhao. " En programmant des informations complexes de structure, domaine, et champ magnétique, on peut même imprimer des machines intelligentes comme des robots."