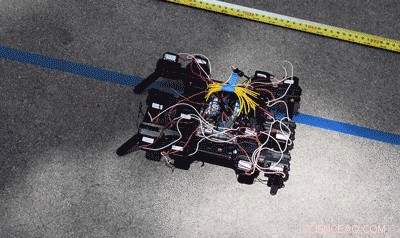
Un robot à quatre pattes a été inspiré par le mouvement d'un chat. Crédit :Photo/Daiming Yang
De ramper et marcher à voler ou nager, les animaux sont capables de se déplacer et d'interagir avec leur environnement avec une relative facilité. Cependant, construire un robot avec les mêmes capacités est beaucoup plus difficile.
"Les roboticiens observent les créatures du monde naturel avec beaucoup d'envie, " dit Satyandra " S.K. " Gupta, qui détient une chaire Smith International Professorship en génie mécanique à l'USC Viterbi School of Engineering.
« S'inspirer de la nature offre de nouvelles possibilités pour réaliser de nouveaux robots. Ainsi, la robotique bio-inspirée est devenue une spécialisation importante dans le domaine de la robotique, " dit Gupta, directeur adjoint du département de génie aérospatial et mécanique et directeur du Center for Advanced Manufacturing.
En imitant les mouvements naturels, ces robots ressemblant à des créatures peuvent aller là où les robots traditionnels ne peuvent pas, comme le terrain difficile des sites sinistrés. Ils peuvent être utilisés pour sauver des vies, améliorer la sécurité ou explorer des emplacements éloignés. En outre, l'adaptation des attributs biologiques peut conduire à des robots plus robustes ou économes en énergie.
Robots imitant des animaux :de nouvelles possibilités
Dans "La robotique d'inspiration biologique, " un cours de premier cycle enseigné par Gupta, les étudiants se sont tournés vers la nature pour de nouvelles possibilités de conception robotique. Après avoir appris les fondamentaux de la robotique traditionnelle et le rôle de la conception d'inspiration biologique, les étudiants ont été chargés de construire et de programmer leur propre robot basé sur les mouvements des animaux.
Crédit :Ashleen Knutsen
Daiming Yang, Chenchen Huang et Shijing Lu ont choisi de construire un robot à quatre pattes qui imite le mouvement d'un chat.
Contrairement aux chiens ou aux chevaux, les chats marchent avec leurs pattes avant pliées en avant plutôt qu'en arrière, ce qui peut créer des "singularités" dans l'analyse de mouvement robotique, dit Yang.
Une autre équipe a choisi de créer un robot qui marchait de côté comme un crabe.
"Notre équipe a essayé de capturer la dynamique passivement stable [série de chutes] que font les crabes lorsqu'ils marchent lentement, " a déclaré Pamela Denny, dont les coéquipiers comprenaient Mary Bessell et Yan Zhang. "La tâche la plus difficile a été de monter le robot et d'éliminer toutes les frictions des articulations. C'était une tâche très détaillée et complexe car il y avait 12 articulations à régler, aligner et ajuster."

Les élèves regardent les quadrupèdes, un robot ressemblant à un chat descend la piste. Crédit :Satyandra "S.K." Gupta
Fin avril, les neuf équipes ont présenté leurs projets à la classe et démontré la capacité unique de leur robot. En marchant, ramper ou faire un pas de côté, chaque robot a parcouru une piste 30 fois plus longue que la longueur de son corps, signifiant le succès d'un effort d'un semestre.
"Notre équipe était si heureuse de créer un crabe qui fonctionnait réellement, " a déclaré Denny. " C'était très amusant et je recommande fortement le cours. "