Optimus Prime sous forme bipède, du film "Les Transformateurs". Voir plus photos de robots . Image © 2007 Dreamworks Photos
Optimus Prime sous forme bipède, du film "Les Transformateurs". Voir plus photos de robots . Image © 2007 Dreamworks Photos Sans aucun doute, le personnel de HowStuffWorks est inquiet au sujet du prochain film "Transformers". Nous ne nous demandons pas seulement si ce sera bon. Nous nous demandons si nous verrons des robots dotés des capacités de Transformers de notre vivant. Alors que les Transformers à grande échelle semblent un peu invraisemblables - et peu pratiques - il s'avère que certains robots existants ont beaucoup en commun avec les Transformers. Dans cet article, nous allons explorer à quoi ressemblent ces robots transformateurs, comment ils fonctionnent et comment ils sont similaires aux transformateurs comme Optimus Prime.
Nous commencerons par une analyse de Prime lui-même. Il est énorme et impressionnant, mais pourrait-il jamais être réel ? Découvrir, nous avons demandé à l'ingénieur Michael D. Belote ce qu'il faudrait pour construire un semi-remorque grandeur nature pouvant se transformer en robot bipède. En d'autres termes, que faudrait-il pour créer une version grandeur nature d'Optimus Prime ?
D'abord, Le premier doit être un robot à reconfiguration automatique . Certains robots à reconfiguration automatique, ou des robots qui peuvent changer de forme pour effectuer différentes tâches, existent aujourd'hui. Cependant, ils sont très différents d'Optimus Prime. Comme l'explique Belote :
Avec des robots auto-reconfigurables, l'ingénieur préfère généralement garder l'individu, modules mobiles petits, Facile, peu coûteux, et interchangeables; dans le cas d'Optimus Prime, cependant, nous avons affaire à un robot dont les modules individuels sont aussi grands que la cabine d'un semi-remorque. Même si la construction de tels modules était possible, la dépense serait exorbitante, et l'extraordinaire complexité rendrait pratiquement impossible le bon fonctionnement de tous les systèmes ensemble.Si les ingénieurs savaient comment fabriquer des modules interchangeables à l'échelle d'Optimus Prime, il pourrait encore être impossible de fournir le pouvoir de les déplacer. Sous sa forme de véhicule, Optimus Prime peut fonctionner avec du carburant diesel ordinaire. Mais marcher est beaucoup moins efficace que rouler sur des roues. Pour marcher, Prime aurait besoin de beaucoup plus de puissance qu'un moteur diesel ne pourrait en fournir. Voici l'analyse de Belote sur la façon de gérer les besoins en énergie de Prime :
Les robots traditionnels sont construits sur l'une des trois sources d'alimentation électrique, pneumatique, ou hydraulique. En raison des poids extrêmes impliqués, l'énergie hydraulique est la source la plus probable pour Prime, parce que les actionneurs hydrauliques fournissent des rapports puissance/poids très élevés (grande puissance de sortie pour de petites entrées de puissance).Donc l'énergie hydraulique pourrait permettre à Prime de marcher, mais le système hydraulique lui-même créerait un autre ensemble de problèmes. "Un réservoir ou un réservoir doit être ajouté pour contenir le fluide hydraulique, " dit Belote, « des pompes hydrauliques sont nécessaires ; une source d'alimentation secondaire doit être utilisée pour alimenter la pompe ; des vannes sont nécessaires pour répondre aux pressions et aux débits appropriés. » En outre, un Prime à propulsion hydraulique devrait être doublé de tuyauterie pour transporter le fluide hydraulique. Ces tuyaux, ainsi que les conduites de carburant et le câblage électrique de Prime, devrait rester intact ou même intact pendant la transformation.
Après avoir survécu à la transformation en forme de robot, Prime devrait alors marcher comme un bipède. Belote décrit ce qu'il faudrait pour que cela se produise :Étant donné que les semi-remorques traditionnelles dépassent fréquemment 30 tonnes de poids, le poids final de Prime pourrait facilement être de l'ordre de 35 à 40 tonnes. Comparez cela au meilleur robot « marche » au monde, Le robot ASIMO de Honda, qui a un poids total de 119 livres et pourtant ne peut marcher que pendant environ 40 minutes (électriquement) et à une vitesse maximale de moins de 2 mph. Le rapport de poids pour ASIMO est de 2,3 lb par pouce, par rapport au rapport pondéral de Prime, qui dépasserait probablement 75 à 80 livres par pouce - une augmentation de trente fois.
En outre, les robots ne peuvent pas facilement imiter le mouvement de la marche. "Avec un robot, " Belote explique, "il y a une commande directe (levez la jambe 'x' montant, se pencher en avant montant « y », étendre la jambe vers le bas du montant « z », etc). Avec les humains, cependant, il n'y a pas de mécanisme de « rétroaction » - votre cerveau ne communique pas constamment à vos jambes sur l'endroit où ils doivent être placés. Au lieu, tu te penches simplement en avant et tu tombes, ' en réglant votre jambe pour absorber le choc lorsque votre pied entre en contact avec le sol."
Il est donc peu probable que nous puissions voir un Optimus Prime ou un robot comme lui au travail de notre vivant. Mais les robots qui peuvent changer de forme ou prendre n'importe quelle forme existent déjà. Nous examinerons certains d'entre eux - et comment ils se comparent à Prime - dans la section suivante.
Contenu
 Optimus Prime peut être à la fois un robot bipède et un semi-camion. Image © 2007 Dreamworks Photos
Optimus Prime peut être à la fois un robot bipède et un semi-camion. Image © 2007 Dreamworks Photos La chose la plus cool à propos de Transformers, bien sûr, est qu'ils peuvent prendre deux formes complètement différentes. La plupart peuvent être des robots bipèdes ou des véhicules de travail. Certains peuvent à la place se transformer en armes ou en appareils électroniques. Les deux formes d'un transformateur ont des forces et des capacités très différentes.
Ceci est complètement différent de la plupart des vrais robots, qui ne sont généralement bons qu'à effectuer une tâche ou quelques tâches connexes. Les Rovers d'exploration de Mars, par exemple, peut effectuer les opérations suivantes :
 Vue d'artiste d'un rover d'exploration de Mars à la surface de Mars Image reproduite avec l'aimable autorisation de la NASA
Vue d'artiste d'un rover d'exploration de Mars à la surface de Mars Image reproduite avec l'aimable autorisation de la NASA Un Exploration Rover ne serait pas très doué pour les tâches qui ne rentrent pas dans ces catégories. ça ne peut pas, par exemple, assembler un pont, s'intégrer dans de très petits espaces ou construire d'autres robots. En d'autres termes, ça ferait un sale robot de recherche et de sauvetage, et il ne s'intégrerait pas du tout dans une usine automatisée.
 Le Snakebot de la NASA est un exemple de robot à chaîne. Image reproduite avec l'aimable autorisation de la NASA
Le Snakebot de la NASA est un exemple de robot à chaîne. Image reproduite avec l'aimable autorisation de la NASA  Un module Télécube G2 Image reproduite avec l'aimable autorisation du Palo Alto Research Center Incorporated
Un module Télécube G2 Image reproduite avec l'aimable autorisation du Palo Alto Research Center Incorporated C'est pourquoi les ingénieurs développent reconfiguration des robots . Comme les transformateurs, ces robots peuvent changer de forme pour s'adapter à la tâche à accomplir. Mais au lieu de passer d'une forme à une autre, comme un robot bipède à un semi-remorque, la reconfiguration des robots peut prendre plusieurs formes. Ils sont beaucoup plus petits que ne le seraient les vrais Transformers; un robot de reconfiguration modules sont assez petits pour tenir dans la main d'une personne.
Un module est essentiellement un petit, robot ou morceau de robot relativement simple. Les robots modulaires sont constitués de beaucoup de ces petits, modules identiques. Un robot modulaire peut être constitué de quelques modules ou de plusieurs, en fonction de la conception du robot et de la tâche qu'il doit effectuer. Certains robots modulaires n'existent actuellement que sous forme de simulations informatiques; d'autres en sont encore aux premiers stades de développement. Mais ils fonctionnent tous sur le même principe de base :de nombreux petits robots peuvent se combiner pour en créer un seul.
Les modules ne peuvent pas faire grand-chose par eux-mêmes. Un système de reconfiguration doit également avoir :
Le plus modulaire, les robots de reconfiguration entrent dans l'une des trois catégories suivantes :chaîne, treillis et configuration modulaire. Robots à chaînes sont de longues chaînes qui peuvent se connecter les unes aux autres à des points spécifiques. Selon le nombre de chaînes et l'endroit où elles se connectent, ces robots peuvent ressembler à des serpents ou des araignées. Ils peuvent également devenir des boucles roulantes ou bipèdes, robots marcheurs. Un ensemble de chaînes modulaires pourrait naviguer sur un parcours d'obstacles en rampant dans un tunnel comme un serpent, traversant un terrain rocheux comme une araignée et chevauchant un tricycle sur un pont comme un bipède.
Des exemples de robots à chaîne sont Polybot et Polypod du Palo Alto Research Center (PARC) et Snakebot de la NASA. La plupart ont besoin d'un humain ou, en théorie, un autre robot, pour fixer manuellement les connexions avec des vis.
Robots simulés
Les simulations informatiques sont un élément essentiel de la recherche en robotique, notamment avec la reconfiguration des robots. Les scientifiques utilisent des ordinateurs pour déterminer comment les modules se déplaceront les uns par rapport aux autres avant d'enseigner aux modules comment le faire. Dans certains cas, les simulations informatiques existent bien avant les robots réels. Le laboratoire de robotique Rus du Massachusetts Institute of Technology (MIT) dispose de nombreuses simulations de la façon dont ces robots se déplacent.
 Les modules Molecule de Rus Robotics Laboratory comportent deux cubes connectés à un angle de 90 degrés. Une surface sur chaque cube abrite le lien qui le relie à l'autre moitié du module. Les cinq autres surfaces peuvent s'attacher à d'autres modules. Image reproduite avec l'aimable autorisation de Keith Kotay/Rus Robotics Laboratory
Les modules Molecule de Rus Robotics Laboratory comportent deux cubes connectés à un angle de 90 degrés. Une surface sur chaque cube abrite le lien qui le relie à l'autre moitié du module. Les cinq autres surfaces peuvent s'attacher à d'autres modules. Image reproduite avec l'aimable autorisation de Keith Kotay/Rus Robotics Laboratory L'idée de base d'un robot en treillis c'est que des essaims de petits, modules identiques qui peuvent se combiner pour former un robot plus grand. Plusieurs prototypes de robots en treillis existent déjà, mais certains modèles n'existent que sous forme de simulations informatiques. Les robots en treillis se déplacent en rampant les uns sur les autres, s'attacher et se détacher des points de connexion sur les robots voisins. C'est comme la façon dont les tuiles se déplacent dans un puzzle de tuiles coulissantes. Cette méthode de déplacement s'appelle reconfiguration du substrat – les robots ne peuvent se déplacer que le long de points à l'intérieur du réseau des robots. Les modules en treillis peuvent avoir des sources d'alimentation autonomes, ou ils peuvent partager des sources d'alimentation via leurs connexions à d'autres modules.
Les robots en treillis peuvent se déplacer sur des terrains difficiles en escaladant les uns les autres, suivant la forme du terrain, ou ils peuvent former un solide, surface stable pour supporter d'autres structures. Assez de robots en treillis peuvent créer à peu près n'importe quelle forme. Des simulations informatiques les montrent passer d'un tas de pièces à une tasse de thé et d'un chien à un canapé. Les modules peuvent se combiner pour faire des surfaces planes, échelles, appendices mobiles et pratiquement toute autre forme imaginable. Ainsi, un robot en treillis ressemble plus à un Terminator T-1000 qu'à un transformateur.
Les laboratoires de robotique ont créé et théorisé plusieurs systèmes de robots en treillis :
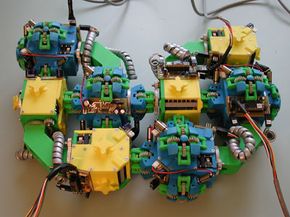
 Les Swarm-bots peuvent manœuvrer indépendamment, ou ils peuvent se combiner pour accomplir des tâches qu'ils ne pourraient pas effectuer seuls. Image reproduite avec l'aimable autorisation du professeur Marco Dorigo
Les Swarm-bots peuvent manœuvrer indépendamment, ou ils peuvent se combiner pour accomplir des tâches qu'ils ne pourraient pas effectuer seuls. Image reproduite avec l'aimable autorisation du professeur Marco Dorigo Comme des robots en treillis, robots de reconfiguration mobiles sont petit, modules identiques qui peuvent se combiner pour former des robots plus gros. Cependant, ils n'ont pas besoin de l'aide de leurs voisins pour se déplacer – ils peuvent se déplacer seuls. Les robots de configuration mobiles ressemblent beaucoup à des représentations de dessins animés de bancs de poissons ou de volées d'oiseaux qui se combinent pour créer un outil ou une structure. Ils se déplacent indépendamment jusqu'à ce qu'ils aient besoin de se réunir pour accomplir une tâche spécifique. Swarm-bots , un projet du programme Future and Emerging Technologies de l'Union européenne, sont des robots de reconfiguration mobiles.
Même si ces robots sont très différents les uns des autres, ils ont de nombreuses similitudes dans la façon dont ils se déplacent et fonctionnent. Nous les examinerons ensuite.
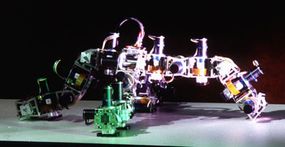
Un vrai transformateurLes transformateurs ne sont pas nécessairement pratiques ou même possibles à grande échelle. Mais les ingénieurs de Himeji Soft Works ont développé un robot à petite échelle qui passe vraiment d'une voiture à un bipède et inversement. Vous pouvez voir une vidéo de ce robot, y compris sa transformation, sur YouTube.
 Les transformateurs sont conscients d'eux-mêmes et peuvent prendre des décisions par eux-mêmes, mais leurs parties mobiles ne sont pas autonomes. Image © 2007 Dreamworks Photos
Les transformateurs sont conscients d'eux-mêmes et peuvent prendre des décisions par eux-mêmes, mais leurs parties mobiles ne sont pas autonomes. Image © 2007 Dreamworks Photos En plus de leur taille et de leur structure modulaire, Les robots à reconfiguration automatique diffèrent des Transformers d'une manière majeure. Optimus Prime et les autres Transformers sont conscients d'eux-mêmes et peuvent prendre des décisions indépendantes, et ils gardent leur cerveau à un endroit dans leur corps. Le cerveau d'un transformateur contrôle chacune de ses pièces mobiles, et les parties elles-mêmes ont peu ou pas d'autonomie.
Dans la plupart des configurations de robots modulaires, bien que, chaque module a un certain pouvoir de décision et aide à déterminer où il va se déplacer. Au lieu qu'un module soit le patron de tous les autres, les capacités de planification et de mouvement sont distribué dans tous les modules.
Cette idée -- un essaim de petits robots, chacun d'eux décide où il va aller – cela peut sembler désastreux. Mais les modules sont programmés avec un ensemble de règles basées sur la géométrie sur la façon de se déplacer. Ils sont également programmés avec des algorithmes qui régissent leur mouvement. Ces algorithmes et règles permettent aux robots de comprendre comment passer d'une forme à une autre et de se déplacer sur le terrain.
Pour les manœuvres très complexes, les robots planifient plutôt une série de sous-formes plutôt que d'essayer de faire un changement majeur en une seule étape. Par exemple, un robot en treillis qui doit passer d'une pile aléatoire de modules à un robot bipède pourrait d'abord former les jambes. Puis, il pourrait utiliser ces jambes comme échafaudage pour construire la moitié supérieure du robot.
 Actuellement, chaque système de robot modulaire a ses propres règles pour régir la façon dont il se déplace et se reconfigure. Image reproduite avec l'aimable autorisation du Palo Alto Research Center Incorporated
Actuellement, chaque système de robot modulaire a ses propres règles pour régir la façon dont il se déplace et se reconfigure. Image reproduite avec l'aimable autorisation du Palo Alto Research Center Incorporated En ce moment, bon nombre de ces robots peuvent effectuer eux-mêmes des transitions simples d'une forme à une autre. Des changements plus complexes pourraient nécessiter l'aide d'un scientifique, rendre la collection de robots semi-autonome plutôt qu'autonome. Quelques robots qui en sont encore aux premiers stades de développement reçoivent toutes leurs instructions à partir d'un poste de travail informatique et ne prennent aucune décision par eux-mêmes.
Actuellement, la plupart des robots de reconfiguration ont leur propre système de règles et d'algorithmes, et les ensembles de règles ne fonctionnent que pour les robots pour lesquels ils ont été conçus. En d'autres termes, les règles du cristal de Rus Robotics Laboratory ne fonctionneront pas avec Molecule.
Cependant, les scientifiques utilisent des simulations informatiques pour rechercher des théories du mouvement qui pourraient fonctionner indépendamment de l'apparence d'un module robotique. Ces théories pourraient établir des règles de base pour le mouvement des robots, comprenant:
En cas de succès, cette recherche pourrait permettre aux ingénieurs de créer plus facilement de nouvelles, des robots modulaires de travail qui suivent les mêmes règles de mouvement.
Même si ces robots ne marchent pas et ne parlent pas comme le font les Transformers, ils peuvent prendre pratiquement n'importe quelle forme, étant donné la bonne programmation et les bonnes instructions. Pour en savoir plus sur eux et sur Transformers, voir les liens sur la page suivante.
Où les transformateurs gardent-ils leur cerveau ?
En travaillant sur cet article, le personnel de HowStuffWorks a eu une discussion animée sur l'endroit où les Transformers gardent leur cerveau. Nous avons tous pressenti la même réponse :le cerveau d'un Transformer doit être dans sa tête (ou dans son cockpit sous forme de véhicule). De nombreuses représentations de bandes dessinées et de dessins animés semblent soutenir cette idée. Cependant, cela n'explique pas entièrement comment certaines parties d'Optimus Prime peuvent fonctionner séparément, sauf si Prime utilise des signaux radio ou infrarouges pour envoyer et recevoir des commandes. Cela n'explique pas non plus entièrement pourquoi les personnalités des Constructicons sont différentes de celles de leurs composants Transformers. Vous pouvez en savoir plus sur les cerveaux de Transformers et leur fonctionnement chez Matrix, un magazine non officiel de Transformers.
Sources