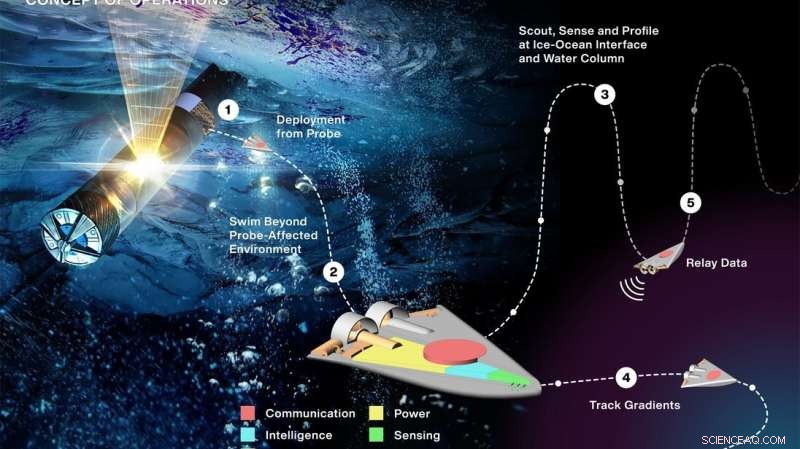
Dans le concept de détection avec des micro-nageurs indépendants (SWIM), illustré ici, des dizaines de petits robots descendraient à travers la coquille glacée d'une lune lointaine via un cryobot - illustré à gauche - jusqu'à l'océan en dessous. Le projet a reçu un financement du programme NASA Innovative Advanced Concepts. Crédit :Jet Propulsion Laboratory
Un jour, un essaim de robots de la taille d'un téléphone portable pourrait traverser l'eau sous la coquille glacée de plusieurs kilomètres d'épaisseur de la lune Europa de Jupiter ou de la lune Encelade de Saturne, à la recherche de signes de vie extraterrestre. Emballés à l'intérieur d'une étroite sonde de fonte des glaces qui creuserait un tunnel à travers la croûte gelée, les minuscules robots seraient relâchés sous l'eau, nageant loin de leur vaisseau mère pour prendre la mesure d'un nouveau monde.
C'est la vision d'Ethan Schaler, ingénieur en mécanique robotique au Jet Propulsion Laboratory de la NASA en Californie du Sud, dont le concept Sensing With Independent Micro-Swimmers (SWIM) a récemment reçu un financement de phase II de 600 000 $ du programme NASA Innovative Advanced Concepts (NIAC). Le financement, qui fait suite à son attribution en 2021 de 125 000 $ dans le cadre du financement de phase I du NIAC pour étudier la faisabilité et les options de conception, lui permettra, à lui et à son équipe, de fabriquer et de tester des prototypes imprimés en 3D au cours des deux prochaines années.
Une innovation clé est que les mini-nageurs de Schaler seraient beaucoup plus petits que d'autres concepts de robots d'exploration planétaire de l'océan, permettant à beaucoup d'être chargés de manière compacte dans une sonde à glace. Ils ajouteraient à la portée scientifique de la sonde et pourraient augmenter la probabilité de détecter des preuves de vie tout en évaluant l'habitabilité potentielle sur un corps céleste océanique lointain.
"Mon idée est, où pouvons-nous prendre la robotique miniaturisée et les appliquer de nouvelles façons intéressantes pour explorer notre système solaire ?" Schaler a dit. "Avec un essaim de petits robots nageurs, nous sommes en mesure d'explorer un volume d'eau océanique beaucoup plus important et d'améliorer nos mesures en ayant plusieurs robots collectant des données dans la même zone."
Ne faisant pas encore partie d'une mission de la NASA, le concept SWIM à ses débuts envisage des robots en forme de coin, chacun d'environ 5 pouces (12 centimètres) de long et d'environ 3 à 5 pouces cubes (60 à 75 centimètres cubes) de volume. Environ quatre douzaines d'entre eux pourraient tenir dans une section de 4 pouces de long (10 centimètres de long) d'un cryobot de 10 pouces (25 centimètres) de diamètre, occupant à peu près 15% du volume de la charge utile scientifique. Cela laisserait beaucoup de place à des instruments scientifiques plus puissants mais moins mobiles qui pourraient recueillir des données pendant le long voyage à travers la glace et fournir des mesures stationnaires dans l'océan.
La mission Europa Clipper, prévue pour un lancement en 2024, commencera à rassembler des données scientifiques détaillées lors de plusieurs survols avec une grande suite d'instruments lorsqu'elle arrivera sur la lune jovienne en 2030. En regardant plus loin dans l'avenir, des concepts de cryobots pour enquêter sur ces mondes océaniques sont en cours. développé dans le cadre du programme Scientific Exploration Subsurface Access Mechanism for Europa (SESAME) de la NASA, ainsi que d'autres programmes de développement technologique de la NASA.

Cette illustration montre le concept de cryobot de la NASA appelé Probe using Radioisotopes for Icy Moons Exploration (PRIME) déployant de minuscules robots en forme de coin dans les kilomètres d'océan sous un atterrisseur sur la surface gelée d'un monde océanique. Crédit :NASA/JPL-Caltech
Mieux ensemble
Aussi ambitieux que soit le concept SWIM, son intention serait de réduire les risques tout en améliorant la science. Le cryobot serait connecté via une attache de communication à l'atterrisseur basé en surface, qui serait à son tour le point de contact avec les contrôleurs de mission sur Terre. Cette approche captif, ainsi que l'espace limité pour inclure un grand système de propulsion, signifie que le cryobot serait probablement incapable de s'aventurer bien au-delà du point où la glace rencontre l'océan.
"Et si, après toutes ces années qu'il a fallu pour entrer dans un océan, vous traversiez la coquille de glace au mauvais endroit ? Et s'il y avait des signes de vie là-bas mais pas là où vous êtes entré dans l'océan ?" a déclaré le scientifique de l'équipe SWIM Samuel Howell du JPL, qui travaille également sur Europa Clipper. "En amenant ces essaims de robots avec nous, nous serions en mesure de regarder 'là-bas' pour explorer beaucoup plus de notre environnement qu'un seul cryobot ne le permettrait."
Howell a comparé le concept à l'hélicoptère Ingenuity Mars de la NASA, le compagnon aéroporté du rover Perseverance de l'agence sur la planète rouge. "L'hélicoptère étend la portée du rover, et les images qu'il renvoie sont un contexte pour aider le rover à comprendre comment explorer son environnement", a-t-il déclaré. "Si au lieu d'un hélicoptère, vous en aviez plusieurs, vous en sauriez beaucoup plus sur votre environnement. C'est l'idée derrière SWIM."
SWIM permettrait également de collecter des données loin de la batterie nucléaire brûlante du cryobot, sur laquelle la sonde s'appuierait pour faire fondre un chemin descendant à travers la glace. Une fois dans l'océan, cette chaleur de la batterie créerait une bulle thermique, faisant fondre lentement la glace au-dessus et provoquant potentiellement des réactions susceptibles de modifier la chimie de l'eau, a déclaré Schaler.
De plus, les robots SWIM pourraient "se rassembler" dans un comportement inspiré des poissons ou des oiseaux, réduisant ainsi les erreurs de données grâce à leurs mesures qui se chevauchent. Ces données de groupe pourraient également montrer des gradients :la température ou la salinité, par exemple, augmentant à travers les capteurs collectifs de l'essaim et pointant vers la source du signal qu'ils détectent.
"S'il y a des gradients d'énergie ou des gradients chimiques, c'est ainsi que la vie peut commencer à apparaître. Nous aurions besoin d'aller en amont du cryobot pour les détecter", a déclaré Schaler.
Chaque robot aurait son propre système de propulsion, son ordinateur de bord et son système de communication par ultrasons, ainsi que de simples capteurs de température, de salinité, d'acidité et de pression. Des capteurs chimiques pour surveiller les biomarqueurs - signes de vie - feront partie de l'étude de phase II de Schaler. La NASA sélectionne des concepts de technologies spatiales futuristes pour une étude précoce