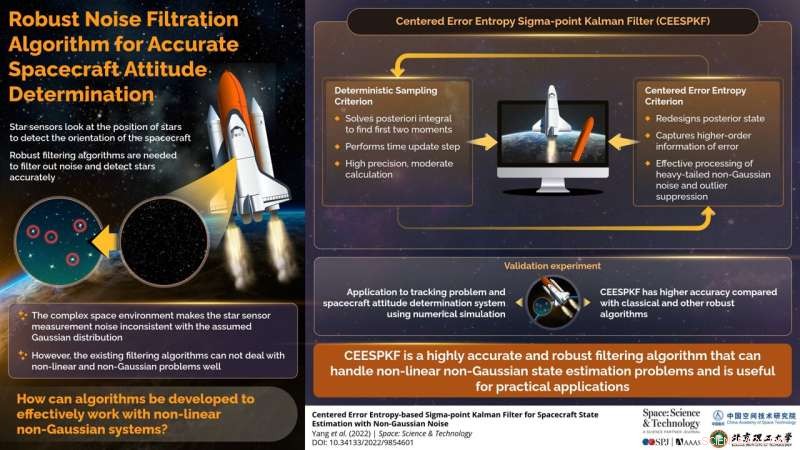
Infographie pour le filtre kalman à point sigma basé sur l'entropie à erreur centrée pour l'estimation de l'état de l'engin spatial avec un bruit non gaussien. Source :Espace :science et technologie
Un modèle cinématique d'attitude d'engin spatial, un modèle de mesure d'attitude et un algorithme de filtre sont trois éléments importants dans la détermination d'attitude d'engin spatial, et un algorithme de filtrage de haute précision est la clé de la détermination d'attitude. Le filtre de Kalman sigma-point classique (SPKF) est largement utilisé dans une zone d'estimation d'état d'engin spatial avec l'hypothèse de bruit blanc gaussien.
Bien que l'algorithme SPKF fonctionne bien dans le bruit blanc gaussien idéal, les conditions de fonctionnement réelles de l'engin spatial en orbite sont compliquées. Les interférences environnementales spatiales, la gigue des panneaux solaires et le bruit de scintillement feront que le bruit ne correspondra plus à la distribution gaussienne et présentera une situation non gaussienne à queue lourde, où la méthode de filtrage SPKF classique n'est plus applicable, et il y aura une dégradation évidente de la précision ou même filtrer la divergence.
Dans un article de recherche récemment publié dans Space :Science &Technology , une équipe conjointe de l'Army Engineering University of PLA et de l'Académie chinoise des sciences militaires, a proposé un algorithme robuste de filtre de Kalman à entropie d'erreur centrée (CEEUKF) en combinant le critère d'échantillonnage déterministe avec le critère d'entropie d'erreur centrée.
Tout d'abord, l'auteur a introduit l'algorithme SPKF classique et le critère CEE. Le filtre de Kalman (KF) est le filtre optimal avec le cadre gaussien linéaire. Cependant, les systèmes réels sont souvent des systèmes non linéaires et il n'existe pas d'algorithme de filtrage optimal pour les systèmes non linéaires. Seules des méthodes approximatives peuvent être utilisées pour les systèmes gaussiens non linéaires.
L'algorithme de filtrage non linéaire basé sur un critère d'échantillonnage déterministe a une plus grande précision que la linéarisation de la fonction non linéaire. Les méthodes classiques de filtrage gaussien non linéaire à échantillonnage déterministe sont le filtre de Kalman non parfumé (UKF), le filtre de Kalman de cubature (CKF) et le filtre de Kalman différentiel central (CDKF). Comme ces méthodes impliquent l'échantillonnage de points déterministes, l'auteur les a appelées méthodes SPKF.
De plus, la méthode UT typique a été utilisée et le UKF est passé en revue. L'UKF classique a utilisé la méthode UT pour obtenir des points d'échantillonnage et approximer la moyenne d'état et la covariance d'erreur d'une fonction de densité de probabilité (PDF). La méthode UKF était plus facile à approximer PDF qu'une fonction non linéaire. L'étape de mise à jour de l'heure et l'étape de mise à jour des mesures y étaient contenues.
Ensuite, l'auteur a pris la combinaison pondérée de la correntropie maximale (MC) et de l'entropie d'erreur minimale (MEE) comme expression de CEE, qui s'est avérée plus robuste que les critères MEE et MC.
Ensuite, l'auteur a dérivé le UKF basé sur l'entropie d'erreur centrée (CEEUKF) par le critère CEE et s'est engagé à étendre cet algorithme aux champs non linéaires et non gaussiens. Le CEEUKF contenait des étapes de mise à jour du temps et des mesures. Pour le système non linéaire, la mise à jour temporelle de l'algorithme CEEUKF était la même que celle de l'algorithme UKF classique, où les méthodes d'échantillonnage au point sigma étaient utilisées pour effectuer l'étape de mise à jour temporelle.
La nouvelle étape de mise à jour des mesures a été conçue sur la base de deux travaux principaux. L'une est l'établissement du modèle augmenté et l'autre est l'estimation de l'état postérieur par le critère CEE. Étant donné que les informations d'ordre supérieur de l'erreur ont été capturées par le critère CEE, les CEESPKF devraient être plus robustes pour gérer le bruit non gaussien que les CEEKF.
Par la suite, l'application au système de détermination d'attitude de l'engin spatial a vérifié la théorie de l'auteur. L'auteur a d'abord présenté le modèle gyroscopique, le modèle du système de détermination d'attitude et le modèle de mesure. Ensuite, l'UKF classique, le filtre de Kalman non parfumé à correntropie maximale (MCUKF) et le filtre de Kalman non parfumé à entropie minimale d'erreur (MEEUKF) et le CEEUKF proposé ont été utilisés pour effectuer la simulation.
Dans le bruit gaussien, la précision de filtrage de CEEUKF et MCUKF était proche de celle de la méthode UKF classique. La précision de filtrage de MEEUKF était médiocre en raison de son instabilité. Dans le bruit non gaussien, l'algorithme CEEUKF proposé avait la plus grande précision de filtrage que l'UKF classique et d'autres algorithmes robustes.
Par ailleurs, le CEEUKF avait également le taux de convergence le plus rapide. Les résultats de filtrage de l'UKF traditionnel avaient la précision de filtrage la plus faible et certaines erreurs estimées importantes se sont produites à différents moments. Le MCUKF avait un meilleur effet de filtrage que le UKF traditionnel, mais il était plus faible que le CEEUKF proposé. En conclusion, par rapport aux algorithmes existants, CEEUKF a montré ses excellentes performances dans le cadre du choix approprié des bandes passantes du noyau dans la simulation du système d'estimation d'attitude du vaisseau spatial. Un nouveau filtre de Kalman pour le suivi des cibles dans l'espace