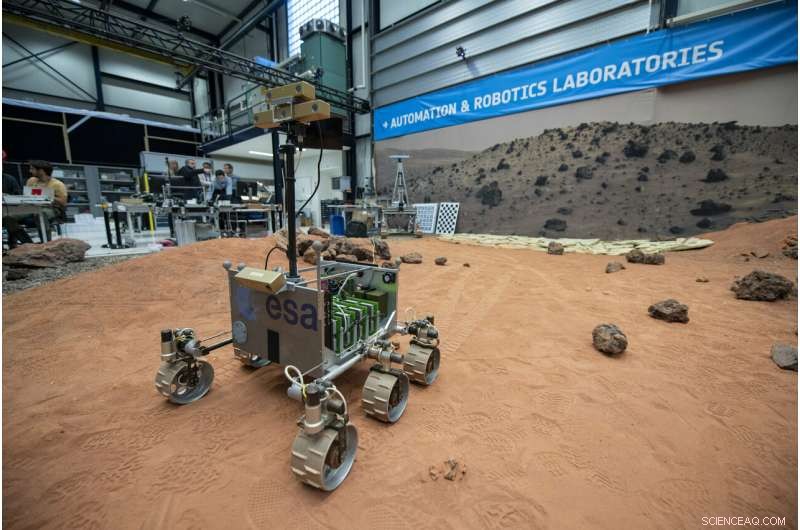
Une version demi-échelle du rover ExoMars, appelé ExoMars Testing Rover (ExoTeR), vu se manœuvrer prudemment à travers les roches rouges et le sable du banc d'essai d'utilisation planétaire de 9 x 9 m, partie du Laboratoire de Robotique Planétaire de l'ESA dans son centre technique ESTEC aux Pays-Bas, comme test d'un logiciel de navigation autonome destiné à la mission ExoMars 2020 de l'ESA sur la planète rouge. Crédit :ESA–G. Porter, CC BY-SA 3.0 IGO
Le logiciel de navigation destiné à la mission ExoMars 2020 sur la planète rouge a réussi un test de conduite basé sur un rover au «Mars Yard» de l'ESA.
Le rover ExoMars de l'ESA se rendra à plusieurs endroits et creusera jusqu'à deux mètres sous la surface de Mars à la recherche d'indices sur la vie passée préservée sous terre.
Une version demi-échelle du rover ExoMars, appelé ExoMars Testing Rover (ExoTeR), s'est manœuvré prudemment à travers les roches rouges et le sable du « Banc d'essai d'utilisation planétaire » de 9 x 9 m, surnommé le Mars Yard, partie du laboratoire de robotique planétaire de l'ESA à l'ESTEC aux Pays-Bas.
Calculant soigneusement son itinéraire, ExoTeR a progressé à une vitesse de 2 m par minute - toujours plusieurs fois plus vite que le rover ExoMars réel ne conduira, qui progressera à 100 m par jour martien.
Le test du rover de deux jours a été réalisé par des ingénieurs robotiques de l'ESA, rejoint par une équipe de l'agence spatiale française CNES à Toulouse. Ils ont plus de deux décennies d'expérience dans la navigation autonome pour les rovers planétaires, aboutissant au développement de la suite de logiciels « AutoNav » qui faisait la conduite.
En 2017, ExoTeR a été transmis à ALTEC en Italie, le site du centre de surveillance et de contrôle du rover d'ExoMars, pour permettre à l'équipe de contrôle de s'entraîner avec le rover avancé. En décembre, le rover est retourné à ESTEC pour une mise à niveau de son algorithme de navigation autonome.
Le test de navigation a suivi, confirmant que le logiciel fonctionnait bien. Le prochain ExoTeR reviendra en Italie, permettant à l'équipe de contrôle d'ALTEC d'acquérir une expérience de travail avec la fonctionnalité supplémentaire de navigation autonome.
L'énorme distance de la Terre à Mars équivaut à un retard de signal compris entre quatre et 24 minutes, rendant le contrôle direct d'ExoMars impossible. Au lieu de cela, le rover sera capable de prendre certaines de ses propres décisions.
"Plutôt que d'envoyer des trajectoires complètes sans danger pour le rover à suivre, la navigation autonome nous permet de ne lui envoyer qu'un point cible, " explique Luc Joudrier, ingénieur robotique de l'ESA.
"Le rover crée une carte numérique de sa proximité et calcule la meilleure façon d'atteindre ce point cible. En regardant la carte, il essaie de placer le rover dans tous ces emplacements adjacents pour déterminer si le rover serait en sécurité dans chacune de ces positions – ou si les rochers sont trop hauts ou le terrain trop escarpé.

Une version demi-échelle du rover ExoMars, appelé ExoMars Testing Rover (ExoTeR), utilisé pour tester le logiciel de navigation autonome développé par le CNES dans les roches rouges et le sable du banc d'essai d'utilisation planétaire de 9x9 m, partie du Laboratoire de robotique planétaire de l'ESA dans son centre technique ESTEC aux Pays-Bas. Crédit :ESA–G. Porter, CC BY-SA 3.0 IGO
"En travaillant à partir de la carte de navigation locale, le rover calcule le chemin sûr vers le but et commence à se déplacer le long d'un segment du chemin calculé, à la fin du segment, il répète le même processus de mappage pour progresser.
« Cela ressemble à une marche humaine. Nous regardons devant nous pour décider où nous allons, mais en marchant, nous scrutons nos pieds et, si nécessaire, changeons de cap pour éviter les obstacles. Une fois que nous avons choisi un chemin sans obstacles, nous nous assurons de suivre ce chemin pour rester en sécurité. »
Le rover ExoTeR, comme le rover ExoMars lui-même, est équipé de caméras de navigation stéréo montées sur mât pour la cartographie numérique de l'altitude. Et comme il roule en avant, il vérifie constamment sa progression à l'aide d'une paire de caméras dans son châssis avant.
Ce suivi de mouvement basé sur la vision fonctionne mieux que la simple mesure du tour des roues du rover, car il permet aux contrôleurs de prendre en compte tout patinage des roues - les rovers sur Mars ont déjà été pris dans du sable profond, et la rotation continue des roues pourrait en fait les creuser plus profondément.

Le rover ExoTeR, comme le rover ExoMars lui-même, est équipé de caméras de navigation stéréo montées sur mât pour la cartographie numérique de l'altitude. Crédit :ESA–G. Porter, CC BY-SA 3.0 IGO
Le rover ExoTeR, complet avec un logiciel mis à jour, est désormais sur le point de revenir à ALTEC en Italie, permettant à l'équipe de contrôle d'acquérir de l'expérience avec la fonctionnalité supplémentaire de navigation autonome avant l'achèvement du logiciel de vol d'ExoMars.
Le logiciel de vol final d'ExoMars comportera en fait deux ensembles de logiciels de navigation autonomes, avec un autre développé par Airbus à Stevenage, ROYAUME-UNI.
"La combinaison devrait donner au rover plus de flexibilité, " dit Luc. " L'idée est que l'on peut s'avérer plus performant sur des terrains plus difficiles, tandis que l'autre pouvait se déplacer plus rapidement sur un terrain plus facile."