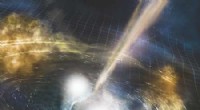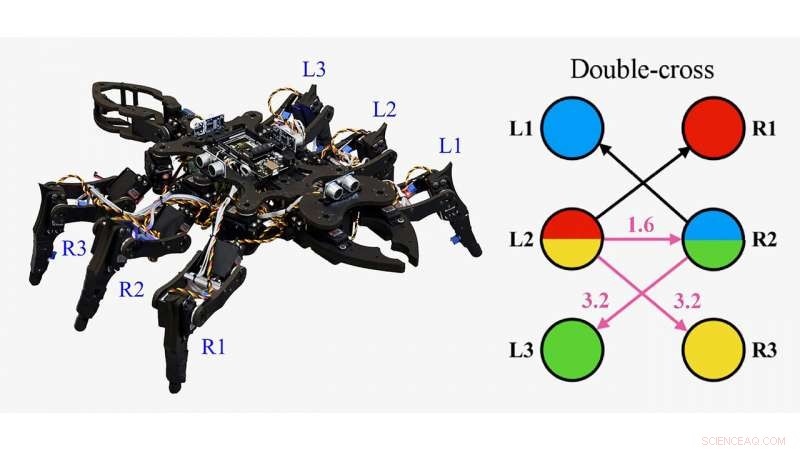
Des chercheurs au Japon et en Italie embrassent le chaos et la physique non linéaire pour créer des démarches semblables à des insectes pour de minuscules robots – avec un contrôleur de locomotion pour fournir une interface cerveau-machine. Vue de leur robot expérimental et schémas de couplage de ses allures. Crédit :Ludovico Minati
Des chercheurs au Japon et en Italie adoptent le chaos et la physique non linéaire pour créer des allures d'insectes pour de minuscules robots, avec un contrôleur de locomotion pour fournir une interface cerveau-machine.
La biologie et la physique sont imprégnées de phénomènes universels fondamentalement ancrés dans la physique non linéaire, et il a inspiré le travail des chercheurs.
Dans la revue le chaos , le groupe décrit l'utilisation du système de Rössler, un système de trois équations différentielles non linéaires, en tant que bloc de construction pour les générateurs de motifs centraux (CPG) pour contrôler la démarche d'un insecte robotique.
"Le caractère universel des phénomènes sous-jacents nous a permis de démontrer que la locomotion peut être réalisée via des combinaisons élémentaires de systèmes de Rössler, qui représentent une pierre angulaire dans l'histoire des systèmes chaotiques, " a déclaré Ludovico Minati, de l'Institut de technologie de Tokyo et de l'Université de Trente.
Les phénomènes liés à la synchronisation permettent au groupe de créer des réseaux très simples qui génèrent des motifs rythmiques complexes.
« Ces réseaux, CPG, sont la base de la locomotion à pattes partout dans la nature, " il a dit.
Les chercheurs ont commencé avec un réseau minimaliste dans lequel chaque instance est associée à une jambe. Changer la démarche ou en créer une nouvelle peut être accompli en apportant simplement de petites modifications au couplage et aux délais associés.
En d'autres termes, l'irrégularité peut être ajoutée en rendant les systèmes individuels ou l'ensemble du réseau plus chaotiques. Pour les systèmes non linéaires, un changement de sortie n'est pas proportionnel à un changement d'entrée.
Ce travail montre que le système de Rössler, au-delà de ses nombreuses propriétés intéressantes et complexes, "peut également être utilisé avec succès comme substrat pour construire un contrôleur de locomotion bioinspiré pour un robot insecte, " dit Minati.
Leur contrôleur est construit avec un électroencéphalogramme pour permettre une interface cerveau-ordinateur.
"L'activité neuroélectrique d'une personne est enregistrée et des concepts non linéaires de synchronisation de phase sont utilisés pour extraire un motif, " a déclaré Minati. " Ce modèle est ensuite utilisé comme base pour influencer la dynamique des systèmes de Rössler, qui génèrent le modèle de marche du robot insecte."
Les chercheurs puisent deux fois dans les idées fondamentales de la dynamique non linéaire.
"D'abord, nous les utilisons pour décoder l'activité biologique, puis en sens inverse pour générer une activité bioinspirée, " il a dit.
L'implication clé de ce travail est qu'il « démontre la généralité des concepts dynamiques non linéaires tels que la capacité du système de Rössler, qui est souvent étudié dans un scénario abstrait, " Minati a dit, "mais est utilisé ici comme base pour générer des modèles biologiquement plausibles."