doctorat étudiant James Jiang, le premier auteur de l'article, montre l'un des flexosquelettes développés avec la méthode d'impression 3D des chercheurs. Crédit :Université de Californie - San Diego
Des ingénieurs de l'Université de Californie à San Diego ont développé une nouvelle méthode qui ne nécessite aucun équipement spécial et fonctionne en quelques minutes pour créer des souple, Robots imprimés en 3D.
L'innovation vient de repenser la façon dont les robots souples sont construits :au lieu de trouver comment ajouter des matériaux souples à un corps de robot rigide, les chercheurs de l'UC San Diego ont commencé avec un corps souple et ont ajouté des caractéristiques rigides aux composants clés. Les structures ont été inspirées par des exosquelettes d'insectes, qui ont à la fois des parties souples et rigides - les chercheurs ont appelé leurs créations "flexosquelettes".
La nouvelle méthode permet la construction de composants souples pour robots en une petite fraction du temps nécessaire auparavant et pour une petite fraction du coût.
"Nous espérons que ces flexosquelettes conduiront à la création d'une nouvelle classe de soft, robots bio-inspirés, " a déclaré Nick Gravish, professeur de génie mécanique à la Jacobs School of Engineering de l'UC San Diego et auteur principal de l'article. "Nous voulons rendre les robots mous plus faciles à construire pour les chercheurs du monde entier."
La nouvelle méthode permet de construire de grands groupes de robots flexosquelettes avec peu d'assemblage manuel ainsi que d'assembler une bibliothèque de composants de type Lego afin que les pièces du robot puissent être facilement échangées.
Les flexosquelettes sont fabriqués à partir de l'impression 3D d'un matériau rigide sur une feuille mince qui agit comme une base flexible. Ils sont imprimés avec diverses caractéristiques qui augmentent la rigidité dans des zones spécifiques, encore une fois inspirées des exosquelettes d'insectes, qui allient douceur et rigidité pour le mouvement et le maintien.
Les chercheurs détaillent leurs travaux dans le numéro du 7 avril de la revue Robotique douce .L'équipe prévoit de mettre leurs conceptions à la disposition des chercheurs d'autres institutions ainsi que des écoles secondaires.
Un composant flexosquelette prend 10 minutes à imprimer et coûte moins de 1 $. L'impression flexosquelette peut être effectuée sur la plupart des imprimantes bon marché disponibles dans le commerce. L'impression et l'assemblage d'un robot complet prennent moins de deux heures.
Les chercheurs ont étudié une gamme de matériaux jusqu'à ce qu'ils trouvent la bonne surface flexible sur laquelle imprimer les flexosquelettes, qui s'est avéré être une feuille de polycarbonate. Une observation attentive du comportement des insectes les a amenés à ajouter des fonctionnalités pour augmenter la rigidité.
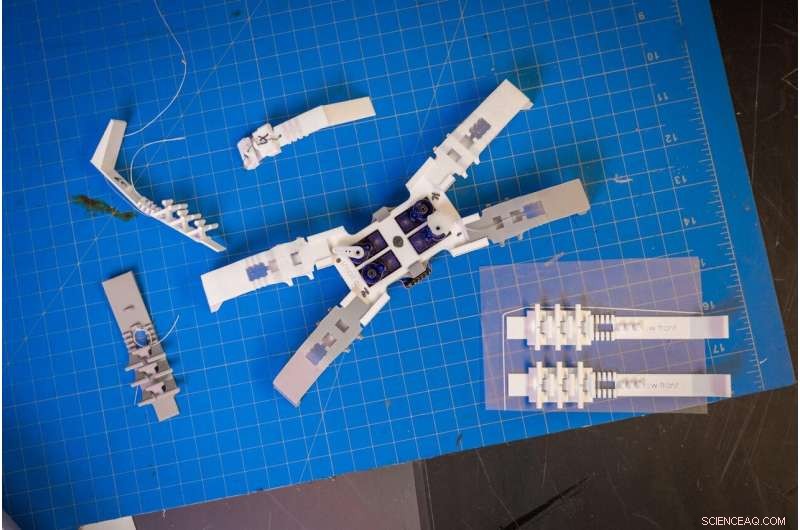
Les pièces imprimées sont facilement interchangeables. Crédit :Université de Californie - San Diego
L'objectif ultime est de créer une chaîne de montage qui imprime des robots flexosquelettes entiers sans avoir besoin d'un assemblage à la main. Un essaim de ces petits robots pourrait faire autant de travail qu'un robot massif à lui seul, voire plus.
En 1989, Rodney Brooks, co-fondateur d'iRobot, puis au MIT Artificial Intelligence Lab, a préconisé des missions spatiales qui consisteraient en "un grand nombre de robots autonomes simples produits en masse qui sont petits par rapport aux normes d'aujourd'hui". Lui et sa coauteur Anita Flynn ont intitulé l'article « Fast, bon marché et hors de contrôle :une invasion robotique du système solaire. qui espère que cette étude est un pas de plus dans cette direction, mais pour l'ensemble du domaine de la robotique, pas seulement l'espace.