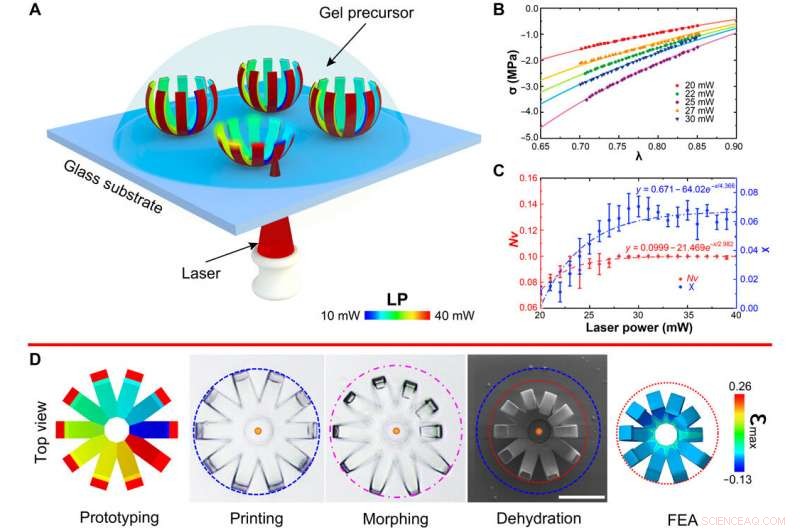
Contrôle spatial et temporel dans l'écriture laser directe pour permettre des réseaux polymères à réticulation différentielle contrôlés spatialement. (A) Schéma du processus d'impression à l'aide d'un système DLW. La barre de couleur de la puissance laser (LP) varie de 10 à 40 mW. (B) Caractéristiques mécaniques du matériau imprimé avec une puissance laser variable, dans laquelle désigne la contrainte nominale de compression et est le taux d'étirement correspondant. (C) Effet de la puissance laser sur la densité de réticulation Nv et le paramètre d'interaction de Flory (χ). (D) Microstructure en forme de fleur avec une réactivité programmée pour démontrer une déformation contrôlable. Les couches externes (passives) de tous les pétales ont été imprimées avec une puissance laser de 40 mW et à une vitesse de balayage de 8 mm/s; la couche interne (active) de chaque pétale a été imprimée à la même vitesse mais avec une puissance laser progressivement augmentée. Après déshydratation complète, les pétales transformés présentaient la même courbure de flexion que celles prédites par FEA. Barre d'échelle, 40 µm. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aav8219
L'impression en quatre dimensions (4D) est basée sur la fusion de l'impression multimatériaux, des motifs de renforcement ou des additifs micro et nanofibreux comme outils programmables en fonction du temps, pour obtenir les reconfigurations de forme souhaitées. Cependant, les approches de programmation existantes suivent toujours un principe de conception d'origami pour générer des structures reconfigurables à l'aide de matériaux 2-D auto-pliants et empilés à petite échelle. Dans un nouveau rapport sur Avancées scientifiques , T. Y. Huang et une équipe interdisciplinaire, des chercheurs internationaux aux États-Unis et en Chine ont proposé une conception modulaire programmable pour construire directement des microstructures reconfigurables en 3D capables de transformations 3D en 3D via un assemblage de microblocs de construction 4D.
Les chercheurs ont utilisé l'écriture laser directe 4-D pour imprimer des hydrogels polymérisables à deux photons et sensibles aux stimuli comme matériau de construction et ont conçu les blocs de construction à l'échelle micrométrique. L'équipe a introduit les paramètres Denavit-Hartenberg (DH) qui sont généralement utilisés pour définir la cinématique du bras robotique (mouvement) comme ligne directrice pour assembler des microblocs de construction et planifier le mouvement 3D des blocs de chaîne assemblés. Ils ont également imprimé en 3D un transformateur à micro-échelle pour changer la forme d'une voiture de course en un robot humanoïde (un peu comme le film mais à petite échelle et en solution acide) pour guider le mouvement d'une variété de compartiments assemblés pour la première fois dans le labo.
Les systèmes de morphing de forme ont de nombreuses applications dans le camouflage, comme actionneurs robotiques souples et dans les dispositifs biomédicaux pour coordonner les machines et leurs environnements. Les chercheurs peuvent utiliser des conceptions informatiques d'origami en tant que plates-formes matérielles 2D standard pour construire un auto-morphing coordonné (auto-façonnage), Machines de morphing 3D. L'auto-façonnage est une technique unique et puissante utilisée pour construire des machines à petite échelle pour l'actionnement de changement de forme sans fil, sans dépendre des processus d'assemblage manuels. Les scientifiques des matériaux avaient également programmé des transformations de forme au sein de matériaux 2D en introduisant des micro- et nanoarchitectures fibreuses pour créer des gels sensibles aux stimuli ou des polymères à mémoire de forme. Les progrès récents de l'impression 3D ont permis aux chercheurs d'imprimer directement des machines avec des propriétés mécaniques spatialement contrôlées. Cependant, Les machines de morphing 3D à la pointe de la technologie existantes reposent toujours sur l'impression 3D basée sur un modèle d'homologues en origami planaires 2D auto-pliants.

Système de morphing modulaire composé de 60 blocs de construction codés en rouleaux lors de l'exposition à l'acide. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aav8219
Une technique de conception programmable pour former avec succès des transformations de forme 3-D en 3-D est limitée en raison de la complexité de calcul accrue requise pour concevoir une telle architecture. Jusqu'à présent, les chercheurs se sont appuyés sur l'analyse par éléments finis (FEA) pour simuler les transformations de forme de structures imprimées en 3D directes, cependant, le processus prend du temps avec une complexité structurelle 3-D croissante. Bien qu'il soit possible de concevoir plusieurs algorithmes pour générer automatiquement l'assemblage de conception et le mouvement dans les robots modulaires, le concept ne peut pas être appliqué aux machines à petite échelle.
Dans le travail present, Huang et al. donc proposé une conception modulaire (personnalisée) de morphing programmable, inspiré par la robotique modulaire et les blocs de construction de type LEGO. L'équipe a facilité la conception de transformations complexes de formes 3D en 3D à l'aide de microstructures imprimées en 3D directes. Ils ont utilisé l'écriture laser directe 4-D (4-D DLW) à une résolution submicronique pour construire une variété de blocs de construction de morphing de forme à micro-échelle, contrôlé par le dosage laser, pour accompagner la transition. Parallèlement à l'écriture laser pour la conception modulaire, les scientifiques ont capturé la cinématique directe et inverse à l'aide des paramètres DH (Denavit-Hartenberg) et ont introduit la FEA pour étudier quantitativement la déformation des blocs de construction. Les paramètres DH leur ont également permis d'assembler le mouvement des compartiments 3D pour des transformations complexes 3D en 3D en réduisant la charge de calcul.
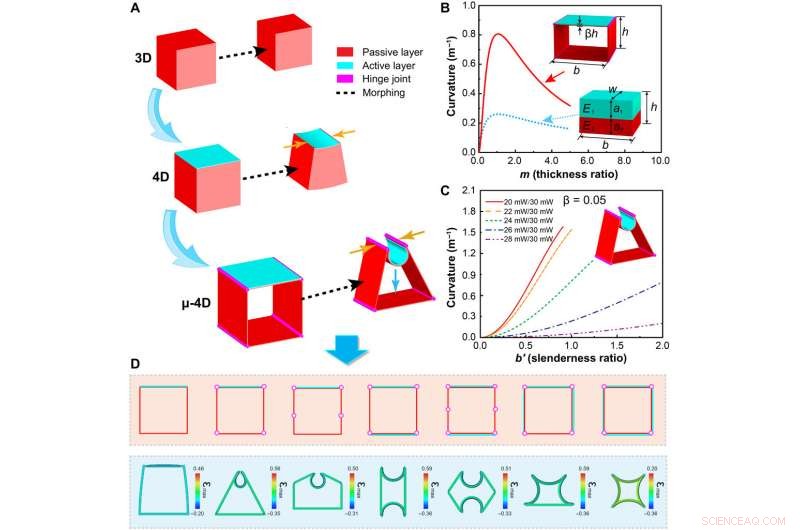
Evolution des blocs de construction imprimés en 3D. (A) Les microblocs de construction 4D évoluent de blocs de construction statiques conventionnels imprimés en 3D à des blocs de construction déformables et ensuite à des blocs de construction articulés grâce au développement de matériaux actifs et de techniques de micro-usinage. Le retrait de la couche active entraîne principalement la déformation lors de la diminution du pH du solvant, ce qui fait que les structures bicouches se courbent vers la couche active. (B) Effet du rapport d'épaisseur entre la couche active et la couche passive (m) sur la courbure de flexion (κ), indiquant que les blocs de construction articulés se déforment plus que les blocs de construction bicouche conventionnels. (C) Courbure de flexion des blocs de construction articulés finement ajustée en faisant varier le rapport d'élancement (b′) entre la largeur et la hauteur des blocs et les paramètres laser entre les couches actives et passives. (D) Divers modes de transformation de forme simulée des blocs de construction articulés en faisant varier l'agencement spatial des mécanismes bicouches et des articulations charnières conformes. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aav8219
L'impression 4-D repose en grande partie sur les mathématiques pour traiter des problèmes avancés et inverses sophistiqués et son succès dépend de la précision des modèles informatiques par rapport aux résultats expérimentaux. Puisque FEA invite une charge de calcul lourde, Huang et al. ont proposé une conception modulaire pour reconstruire une structure 3-D grande et compliquée et sa transformation de forme en utilisant des blocs de construction petits et discrétisés pour lesquels ils ont introduit la FEA basée sur la théorie de Flory pour étudier la déformation de chaque bloc de construction. Les scientifiques ont mené des tests de compression micromécanique dans une solution alcaline pour caractériser la relation contrainte et déformation des gels polymérisés en fonction de la puissance du laser.
Après avoir caractérisé le matériau, Huang et al. a mené une simulation par éléments finis basée sur le logiciel commercial Abaqus pour prédire l'évolution de la forme de structures 3D avec un potentiel chimique variable. Pour vérifier initialement l'exactitude de la prédiction FEA, ils ont formé une micro-fleur contenant 10 pétales en forme de bicouche, chacun codé avec différents dosages laser pour permettre à diverses courbures de morphing de gonfler et de rétrécir dans différents environnements. La structure imprimée rétrécit considérablement dans les solutions acides, la force motrice dominante facilitant la déformation dans les blocs de construction imprimés.
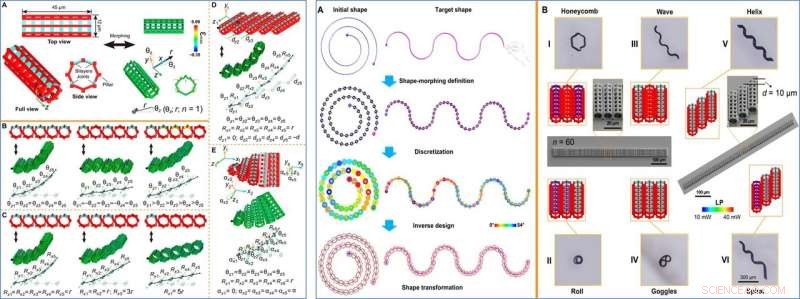
A GAUCHE :Principe de conception et règles d'assemblage du système modulaire à l'aide de simulations par éléments finis. (A) Schémas et géométrie de conception des blocs de construction articulés dont la structure de base est un cylindre creux prismatique octogonal composé de paires de couches actives, couches passives, et charnières. (B) Déformation en rotation induite par le rétrécissement des couches actives. Chaque bloc de construction peut être considéré comme une combinaison d'un joint rotatif et d'une barre rigide, ressemblant à un bras robotique. (C à E) Schémas de mouvements de rotation avec amplitude et orientation contrôlées permis par l'assemblage de divers blocs de construction préprogrammés. (B), (C), (RÉ), et (E) définir comment les quatre paramètres DH , R, ré, et α sont mis en œuvre dans nos blocs de construction modulaires, respectivement. FEA fournit un moyen pour l'assemblage quantitatif du système modulaire complexe. DROITE :Conception inversée et avancée de systèmes modulaires de morphing. (A) Recherche de problème inverse pour programmer une structure qui se transforme en la forme souhaitée. Étant donné une forme arbitraire, comme une vague, la conception modulaire le convertit en une contrepartie discrète avec un nombre fini de joints et obtient ensuite les paramètres DH. Le système modulaire construit ensuite la transformation de forme entre la forme d'onde donnée et une configuration de rouleau assemblé en codant le θz inversé dans le rouleau, pour qu'il prenne la forme d'une vague. A l'image du dessin inversé d'un rouleau codé avec différentes couleurs, les cercles pleins indiquent que θz est positif, et les cercles creux indiquent que z est négatif. (B) Images optiques des blocs de construction assemblés codés avec différents paramètres DH. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aav8219
Huang et al. puis représenté les blocs de construction 4-D comme des cellules cubiques avec une configuration bicouche contenant des matériaux actifs et passifs. Ils ont calculé la courbure de liaison des micro-blocs de construction formulés, affinés par leur rapport d'élancement et la puissance laser sur la couche active. Pour assembler et planifier le mouvement du système modulaire, Huang et al. pris en compte la rigidité structurelle globale, liberté d'assemblage et programmabilité des micro-blocs de construction 4-D. Pour ce faire, ils ont utilisé un microcylindre prismatique octogonal comme élément de base pour construire un système modulaire de morphing plus grand et plus compliqué.
Les scientifiques ont observé l'auto-assemblage de plusieurs blocs de construction pour ressembler à un bras robotique générant les mouvements 3D souhaités, qu'ils ont estimé à l'aide de la FEA et les résultats sont bien en accord avec les expériences. Cependant, FEA n'a pas pu capturer la complexité de mouvement générée par un plus grand nombre de blocs de construction (n> 60). Pour remédier à ce, Huang et al. introduit les paramètres DH (Denavit-Hartenberg) avec seulement quatre paramètres physiques sous une forme analytique fermée pour calculer les transformations de forme d'un bras robotique contenant plusieurs articulations et barres rigides. Ces paramètres ont déterminé les transformations 3D et les règles d'assemblage du système modulaire proposé.
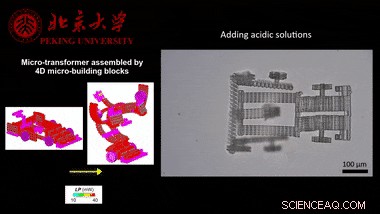
Micro-transformateur assemblé par microblocs 4-D. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aav8219
Finalement, les scientifiques ont conçu un transformateur à petite échelle via un assemblage 3D et une planification de mouvement 3D de blocs de construction 4D, imprimé à l'aide de 4-D DLW. Le mini-transformateur contenait cinq segments fonctionnels principaux, y compris le cou, épaule, les bras, colonne vertébrale et jambes, à côté de leurs relations. Huang et al. capturé les transformations de chaque compartiment via une série de paramètres DH et formé une transition de morphing de forme unique entre une voiture de course et un robot humanoïde.
Le résultat a été une première étude pour créer un mini-transformateur qui changeait automatiquement de forme pour se tenir debout, en laboratoire. Cependant, il est toujours difficile de concevoir rationnellement un transformateur qui se transforme simultanément sans interférer avec chaque composant pour une transformation synchronisée. Alors que le transformateur à micro-échelle est une construction de preuve de principe extrêmement simplifiée par rapport à ses homologues plus grands à l'écran, les chercheurs peuvent concevoir de véritables structures imprimées en 4D avec une dimension temporelle codée pendant l'impression pour faciliter les conceptions reconfigurables et former divers compartiments à transformer séquentiellement comme souhaité.
De cette façon, T. Y. Huang et ses collègues ont proposé une conception modulaire programmable basée sur l'assemblage de micro-blocs de construction 4-D pour résoudre les problèmes complexes avant et inverse de l'impression 4-D. Ils ont utilisé la FEA pour prédire l'évolution de la forme de chaque bloc de construction, sans considérer l'ensemble de la structure afin de réduire notablement la complexité de calcul. Le transformateur à micro-échelle résultant était capable de transformations 3-D complexes basées sur quatre paramètres DH et un processus de fabrication DLW en une seule étape utilisant des hydrogels photosensibles. Huang et al. prévoir que la conception modulaire proposée ouvrira la voie pour faciliter de nouvelles conceptions d'impression 4-D complexe.
© 2020 Réseau Science X