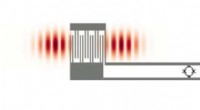
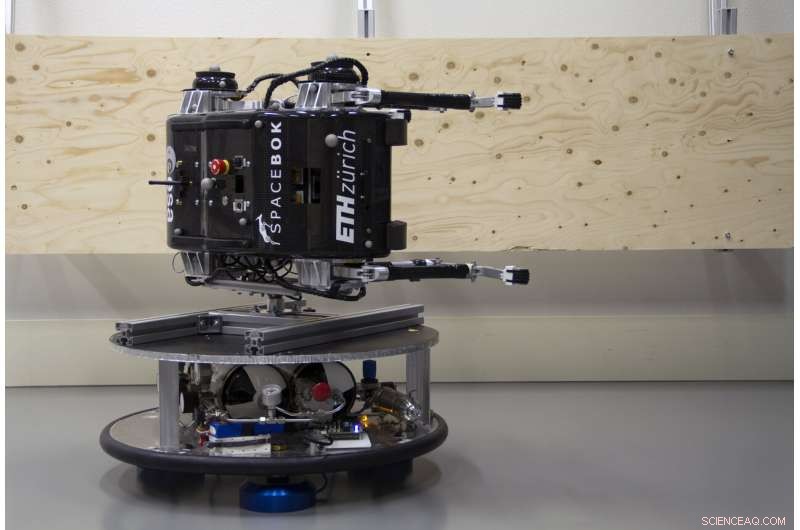
Jouer au Pong avec le classique du jeu vidéo SpaceBok. Pour simuler la gravité extrêmement faible des astéroïdes, l'équipe SpaceBok a utilisé le sol le plus plat des Pays-Bas - un sol en époxy de 4,8 x 9 m lissé à une planéité globale inférieure à 0,8 mm, appelé Banc de robotique orbital pour la technologie intégrée (ORBIT), fait partie du Laboratoire de robotique orbitale et de navigation et de contrôle du guidage de l'ESA. SpaceBok a été placé sur le côté, puis attaché à une plate-forme flottante pour reproduire les conditions zéro-G en deux dimensions. Lorsqu'il sautait d'un mur, sa roue de réaction lui permettait de virevolter à mi-saut, le laisser retomber les pieds les premiers de l'autre côté de la chambre - comme s'il sautait le long d'une surface unique à faible gravité réduite. Crédit :ETH Zurich/ZHAW Zurich
Les astronautes sur la Lune se sont retrouvés à sauter partout, plutôt que de simplement marcher. Le robot suisse d'exploration planétaire SpaceBok a suivi leur exemple, en lançant les quatre pattes du sol lors d'essais au cœur technique de l'ESA.
SpaceBok est un robot quadrupède conçu et construit par une équipe d'étudiants suisses de l'ETH Zurich et de la ZHAW Zurich. Il est actuellement testé à l'aide d'installations robotiques au centre technique ESTEC de l'ESA aux Pays-Bas.
Les travaux se poursuivent sous la direction de Ph.D. l'étudiant Hendrik Kolvenbach du Robotic Systems Lab de l'ETH Zurich, actuellement basé à l'ESTEC. Le robot est utilisé pour étudier le potentiel de la « marche dynamique » pour se déplacer dans des environnements à faible gravité.
Hendrik explique :« Au lieu de la marche statique, où au moins trois jambes restent au sol en tout temps, la marche dynamique permet des allures avec des phases de vol complètes pendant lesquelles toutes les jambes ne touchent pas le sol. Les animaux utilisent des allures dynamiques en raison de leur efficacité, mais jusqu'à récemment, la puissance de calcul et les algorithmes requis pour le contrôle ont rendu difficile leur réalisation sur des robots.
"Pour les environnements à faible gravité de la Lune, Mars ou astéroïdes, sauter du sol comme ça s'avère être un moyen très efficace de se déplacer."
"Les astronautes se déplaçant dans le sixième de la gravité de la Lune ont adopté le saut instinctivement. SpaceBok pourrait potentiellement atteindre 2 m de haut en gravité lunaire, même si une telle hauteur pose de nouveaux défis. Une fois qu'il a décollé du sol, le robot à pattes doit se stabiliser pour redescendre en toute sécurité - il se comporte essentiellement comme un mini-vaisseau spatial à ce stade, " déclare Alexander Dietsche, membre de l'équipe.
« Donc, ce que nous avons fait, c'est exploiter l'une des méthodes utilisées par un satellite conventionnel pour contrôler son orientation, appelée roue de réaction. Il peut être accéléré et décéléré pour déclencher une réaction égale et opposée dans SpaceBok lui-même, " explique Philip Arm, membre de l'équipe.
"En outre, Les jambes du SpaceBok intègrent des ressorts pour stocker l'énergie lors de l'atterrissage et la libérer au décollage, réduisant considérablement l'énergie nécessaire pour réaliser ces sauts, " ajoute un autre membre de l'équipe, Benjamin Soleil.
L'équipe augmente lentement la hauteur des sauts répétitifs du robot, jusqu'à 1,3 mètre dans des conditions de gravité lunaire simulées jusqu'à présent.
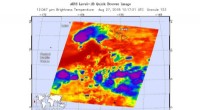
Des bancs d'essai ont été mis en place pour simuler divers environnements de gravité, imitant non seulement les conditions lunaires mais aussi la très faible gravité des astéroïdes. Plus la gravité est faible, plus la phase de vol peut être longue pour chaque saut de robot, mais un contrôle efficace est nécessaire à la fois pour le décollage et l'atterrissage.
Des bancs d'essai pour SpaceBok ont été mis en place pour simuler divers environnements de gravité, imitant non seulement les conditions lunaires mais la très faible gravité des astéroïdes. Plus la gravité est faible, plus la phase de vol peut être longue pour chaque saut de robot, mais un contrôle efficace est nécessaire à la fois pour le décollage et l'atterrissage. Crédit :ETH Zurich/ZHAW Zurich
SpaceBok est un robot quadrupède conçu et construit par une équipe d'étudiants suisses de l'ETH Zurich et de la ZHAW Zurich. Il est actuellement testé à l'aide d'installations robotiques au centre technique ESTEC de l'ESA aux Pays-Bas. Le robot est utilisé pour étudier le potentiel de la « marche dynamique » pour se déplacer dans des environnements à faible gravité. Des bancs d'essai ont été mis en place pour simuler divers environnements de gravité. SpaceBok pourrait potentiellement monter jusqu'à 2 m de haut en gravité lunaire, bien qu'une telle hauteur oblige le robot à se stabiliser avec une roue de réaction redescendre en toute sécurité. Crédit :ETH Zurich/ZHAW Zurich
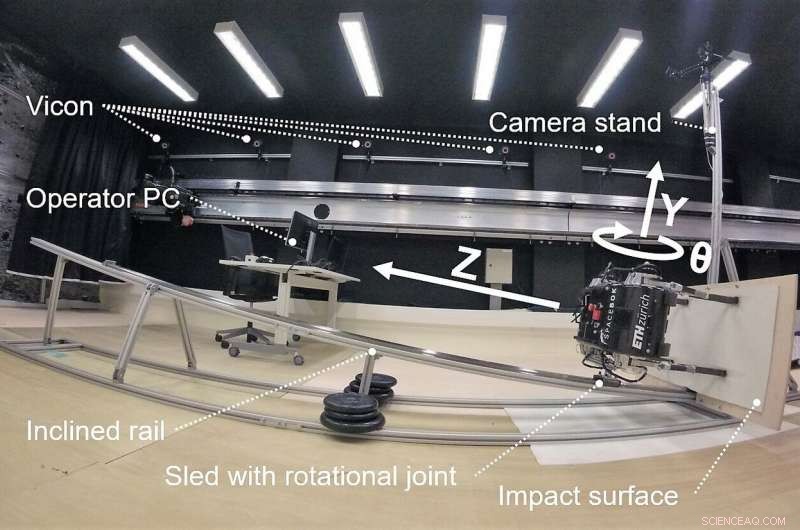
SpaceBok monté latéralement sur une plate-forme à coussin d'air flottante. Pour simuler la gravité extrêmement faible des astéroïdes, l'équipe SpaceBok a utilisé le sol le plus plat des Pays-Bas - un sol en époxy de 4,8 x 9 m lissé à une planéité globale inférieure à 0,8 mm, appelé Banc de robotique orbital pour la technologie intégrée (ORBIT), fait partie du Laboratoire de robotique orbitale et de navigation et de contrôle du guidage de l'ESA. SpaceBok a été placé sur le côté, puis attaché à une plate-forme flottante pour reproduire les conditions zéro-G en deux dimensions. Lorsqu'il sautait d'un mur, sa roue de réaction lui permettait de virevolter à mi-saut, le laisser retomber les pieds les premiers de l'autre côté de la chambre - comme s'il sautait le long d'une surface unique à faible gravité réduite. Crédit :ETH Zurich/ZHAW Zurich 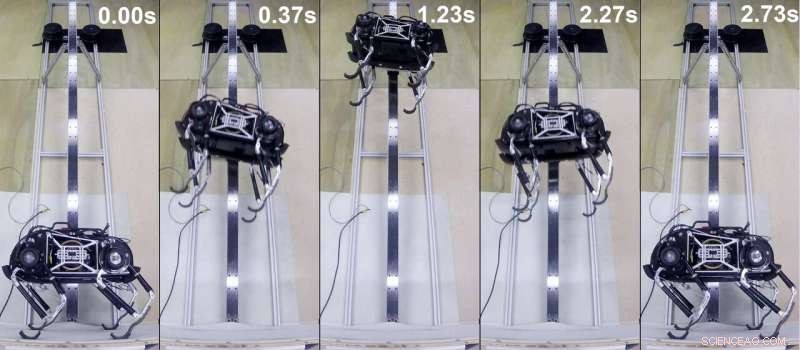
SpaceBok a été placé sur le côté, puis attaché à une plate-forme flottante pour reproduire les conditions zéro-G en deux dimensions. Lorsqu'il sautait d'un mur, sa roue de réaction lui permettait de virevolter à mi-saut, le laisser retomber les pieds en avant de l'autre côté de la chambre, comme s'il sautait le long d'une seule surface à faible gravité réduite.
Hendrik a ajouté :« Les tests se sont suffisamment bien déroulés pour que nous ayons même utilisé SpaceBok pour jouer à un jeu de Pong en direct, le classique du jeu vidéo."
Les tests se poursuivront dans des conditions plus réalistes, avec des sauts par dessus des obstacles, Un terrain vallonné, et sol réaliste, finalement déménager à l'extérieur.
Hendrik étudie à l'ESTEC dans le cadre de la Networking Partnering Initiative de l'ESA, destiné à exploiter la recherche universitaire de pointe pour des applications spatiales.