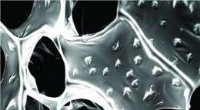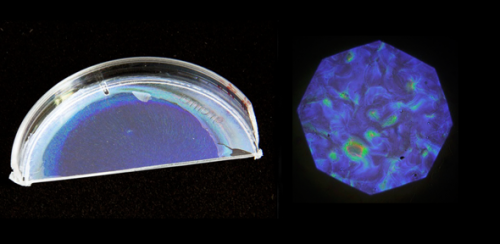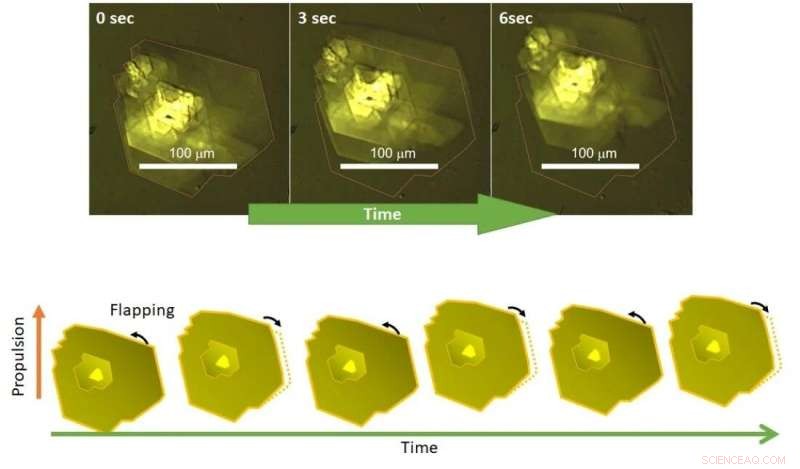
(Ci-dessus) Une série de micrographies lumineuses montrant le mouvement de l'un des microrobots synthétisés dans cette étude ; (Ci-dessous) Une représentation du mouvement de la nageoire dans le temps (Kazuma Obara, Yoshiyuki Kageyama, Sadamu Takeda. Small. 27 novembre 2021). Crédit :Kazuma Obara, Yoshiyuki Kageyama, Sadamu Takeda. Petit. 27 novembre 2021
Créer des microrobots moléculaires qui imitent les capacités des organismes vivants est un rêve de la nanotechnologie, comme l'illustre le célèbre physicien Richard Feynman. Il y a un certain nombre de défis à relever pour atteindre cet objectif. L'une des plus importantes d'entre elles est la création d'une autopropulsion dirigée dans l'eau.
Une équipe de trois scientifiques de l'Université d'Hokkaido, dirigée par le professeur adjoint Yoshiyuki Kageyama, a réussi à créer un microcristal qui utilise un mouvement alternatif continu pour la propulsion. Leurs conclusions ont été publiées dans la revue Small .
Le rêve des microrobots est ancien, abordé dans la science-fiction depuis de nombreuses décennies et popularisé par l'essor des nanotechnologies. L'un des aspects de ces robots est l'autopropulsion, la capacité de se déplacer de manière autonome. Il y a deux défis majeurs pour y parvenir :le premier est de fabriquer un robot moléculaire capable de se déformer réciproquement, et le second est de convertir cette déformation en propulsion du robot moléculaire.
Le groupe de Kageyama s'est appuyé sur ses recherches antérieures qui avaient résolu le premier défi :la création de robots moléculaires capables de se déformer réciproquement. Cependant, les objets minuscules ne peuvent pas convertir leur mouvement réciproque en mouvement progressif, en général, comme l'explique le théorème de la coquille Saint-Jacques d'Edward Purcell. Dans l'étude actuelle, les scientifiques sont allés à l'étape suivante et ont réussi à réaliser l'autopropulsion du robot moléculaire dans un système expérimental où le mouvement était confiné à deux dimensions; dans ce système, la résistance visqueuse agit de manière anisotrope, ce qui la rend négligeable.
Des robots moléculaires mobiles nagent dans l'eau
Le microrobot était alimenté par une lumière bleue, qui provoquait une série de réactions conduisant au retournement des ailerons et à la propulsion. En raison de la nature des réactions, le mouvement n'était pas continu, mais se produisait par intermittence; de plus, les robots moléculaires présentaient l'un des trois styles de propulsion différents :un style « coup », avec la nageoire devant; un style "coup de pied", avec l'aileron derrière ; ou un style "side-stroke", avec l'aileron d'un côté. La nature de la mobilité était affectée par la surface de la nageoire et son angle d'élévation; les cristaux individuels se sont propulsés dans différentes directions et styles.
Les scientifiques ont ensuite créé un modèle de calcul minimum pour comprendre les variables qui affectaient la propulsion dans un réservoir bidimensionnel. Ils ont pu déterminer que la longueur des nageoires, le rapport des nageoires et l'angle d'élévation étaient les variables clés affectant la direction et le rythme des propulsions.
"Le résultat, qui a démontré que de minuscules clapets peuvent nager grâce à l'anisotropie causée par des espaces confinés, pourrait stimuler la recherche sur les robots moléculaires", explique Kageyama. "Un mécanisme similaire peut être dans le mouvement de petits organismes aquatiques dans des conditions spécifiques telles que l'intérieur des œufs." Les chercheurs développent des moteurs moléculaires alimentés par la lumière qui se plient et se déplient de manière répétitive