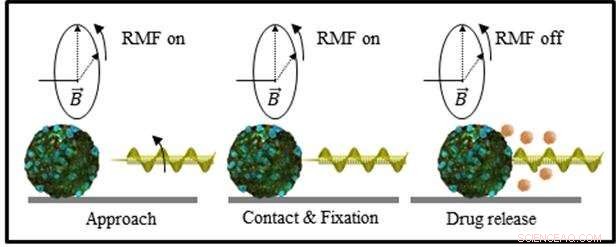
Le microrobot en forme de tire-bouchon est chargé d'un médicament puis délivré à un tissu ciblé à l'aide d'un champ magnétique externe. L'extrémité de l'aiguille agit comme une lance, le fixant au tissu sans avoir besoin d'une application continue d'un champ magnétique. Crédit :DGIST
Une aiguille microrobotique chargée de médicament cible efficacement et reste attachée au tissu cancéreux lors d'expériences en laboratoire sans avoir besoin d'une application continue d'un champ magnétique, permettant une administration plus précise du médicament. Les détails ont été publiés par des chercheurs du Microrobot Research Center de DGIST en Corée et des collègues de la revue Matériaux de santé avancés .
"Les médicaments chimiothérapeutiques provoquent un large éventail d'effets secondaires en raison de leurs impacts sur les tissus sains et cancéreux, " explique l'ingénieur en robotique Hongsoo Choi de l'Institut coréen des sciences et technologies Daegu-Gyeongbuk (DGIST), qui a dirigé la recherche. "Pour éviter ces effets indésirables, les scientifiques ont expérimenté des microrobots de différentes formes qui délivrent des médicaments à des tissus spécifiques. »
Les microrobots porteurs de médicaments nécessitent généralement un champ magnétique pour les diriger vers les tissus ciblés, puis les maintenir en place, sinon, ils sont facilement évacués par les fluides corporels tels que le flux sanguin. Choi et ses collègues voulaient concevoir un microrobot fonctionnel qui évite l'utilisation peu pratique et prolongée d'un champ magnétique énergivore.
Ils ont réussi à fabriquer un microrobot en forme de tire-bouchon avec une aiguille à son extrémité.
Choi a travaillé avec Seungmin Lee de DGIST et ses collègues pour fabriquer la micro-aiguille en forme de tire-bouchon en utilisant la lithographie laser. Le microrobot est ensuite recouvert d'oxyde de nickel et de titane pour garantir qu'il peut être manipulé magnétiquement et qu'il est biocompatible avec le corps humain. Les médicaments peuvent être chargés sur le poreux, échafaudage en forme de tire-bouchon et à l'intérieur de l'aiguille.
L'équipe a testé les microrobots dans de minuscules chambres remplies de liquide. Ils ont utilisé avec succès un champ magnétique pour les diriger vers la lance et se fixer aux tissus. Une fois fixé, il a fallu une vitesse d'écoulement du fluide de 480 millimètres par seconde pour chasser l'aiguille du tissu. En comparaison, le débit dans les petites artérioles est d'environ 100 millimètres par seconde.
Ils ont ensuite utilisé une approche computationnelle pour des calculs automatiques plus précis, plutôt que manuel, ciblage des tissus à l'aide d'un champ magnétique. Le ciblage et la fixation automatiques n'ont pris que sept secondes, alors que le contrôle manuel du champ magnétique prenait 55 secondes.
Finalement, ils ont chargé les microaiguilles avec le médicament anticancéreux paclitaxel et les ont testées dans une microchambre contenant des cellules cancéreuses colorectales humaines. Les microrobots ciblaient et tuaient efficacement les cellules.
Prochain, l'équipe prévoit d'améliorer le microrobot pour un chargement plus efficace des médicaments et d'optimiser le système de champ magnétique pour un contrôle plus précis. D'autres tests sur animaux, puis sur des humains, seront nécessaires avant que les microrobots puissent être utilisés comme stratégie de traitement.