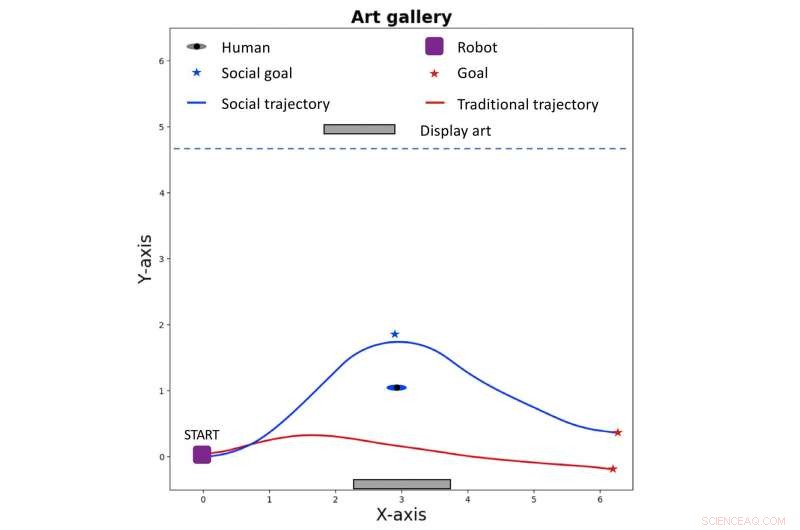
Un robot mobile prenant en compte l'espace d'activité dans une galerie d'art où le robot avec SAN planner évite d'entrer dans l'espace d'activité, représenté par la trajectoire bleue. Crédit :Banisetty et al.
Les robots mobiles font progressivement leur chemin dans un certain nombre d'environnements habités, y compris les hôpitaux, les centres commerciaux et les maisons des gens. Pour que ces robots interagissent avec les humains dans leur environnement, ils doivent respecter un certain nombre de normes sociales tacites associées au partage d'un environnement donné avec d'autres.
Avec ça en tête, chercheurs de l'Université du Nevada, Reno a récemment développé un système non linéaire, approche d'optimisation multi-objectifs qui pourrait permettre une navigation socialement consciente dans les robots mobiles. Cette approche, décrit pour la première fois dans un article présenté à la Conférence internationale sur les robots et les systèmes (IROS) 2018 et maintenant publié sur arXiv, veille à ce que les robots n'envahissent pas l'espace personnel des humains dans leur environnement, tout en permettant des interactions homme-robot (HRI) plus efficaces dans plusieurs scénarios.
"Cette recherche a d'abord commencé dans le cadre de mon travail de thèse avec des robots et des enfants, " David Feil-Seifer, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Les travaux antérieurs consistaient à développer un robot pour des environnements où nous voulions qu'un robot interagisse avec les enfants. Dans ce cas, nous avons fait en sorte que le robot emprunte le chemin le plus « efficace » par les métriques qui sont couramment utilisées dans la planification du chemin du robot (minimiser le temps pour un mouvement, minimiser la distance parcourue, ne touche rien)."
Dans une étude précédente publiée dans le Journal de l'interaction homme-robot , Feil-Seifer et ses collègues ont essayé de développer des comportements de navigation robotique pour des environnements peuplés d'enfants. Le travail pilote a montré que le robot était efficace pour atteindre l'emplacement souhaité sans rien heurter, mais les chercheurs ont observé que les enfants réagissaient généralement mal au robot.
En réalité, le robot utilisé dans leurs expériences se détournerait généralement des enfants et se déplacerait aussi vite que possible vers l'emplacement souhaité. En conséquence de ce comportement, les enfants pensaient que le robot ne voulait pas interagir avec eux.
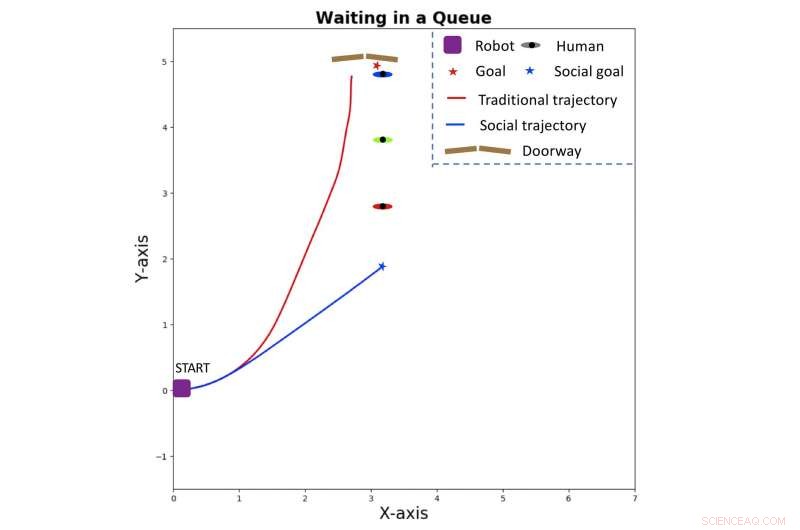
Un robot mobile rejoint une queue, formé devant un scénario de porte. Le planificateur traditionnel a généré la trajectoire rouge, guider le robot vers un emplacement à côté de la première personne (inapproprié), couper la ligne. La trajectoire bleue, notre approche proposée, amener le robot à rejoindre la ligne (approprié). Crédit :Banisetty et al.
"Nous avons observé le robot et vu qu'il ne se déplaçait pas vraiment comme une personne, prendre des informations sociales et les utiliser pour aider à la planification de son parcours, " Feil-Seifer a déclaré. "Nous avons donc décidé de créer un planificateur de navigation qui peut utiliser les informations de distance sociale afin d'exécuter des mouvements socialement appropriés."
Dans la même étude précédente, Feil-Seifer et ses collègues ont permis au robot de déterminer si un mouvement planifié était socialement approprié à l'aide d'une méthode mathématique simple appelée modèles de mélange gaussien (GMM). Cette méthode fonctionnait bien dans des situations où les facteurs sociaux pouvaient être facilement compris et représentés à l'aide d'un modèle mathématique linéaire simple.
Comme la plupart des interactions sociales du monde réel impliquent plusieurs facteurs difficiles à intégrer dans un modèle linéaire, cependant, la méthode simple qu'ils ont développée ne se généraliserait pas bien dans différentes situations sociales, et dans de nombreux cas, ça ne marcherait pas du tout. Dans leur nouvelle étude, les chercheurs ont donc décidé de mettre à jour le planificateur qu'ils avaient développé précédemment afin d'optimiser les mouvements planifiés du robot, tenant compte des relations non linéaires entre les diverses propriétés sociales qu'ils voulaient que le robot prenne en compte. Cela impliquait l'utilisation d'un planificateur compatible avec la transformation par élimination de concavité de Pareto (PaCcET).
« Les principaux avantages de notre approche sont qu'elle peut prendre en compte ces relations non linéaires entre les divers facteurs sociaux (c'est-à-dire, où tu es dans un couloir, où vous êtes par rapport à d'autres personnes, à quel point vous êtes proche de votre objectif, etc.) en compte, " a déclaré Feil-Seifer.
Feil-Seifer et ses collègues ont appliqué leur approche d'optimisation non linéaire à plusieurs scénarios dans lesquels un robot devait respecter des normes sociales, par exemple, en n'envahissant pas l'espace personnel des gens. Ils ont constaté que leur approche fonctionnait bien dans bon nombre de ces scénarios, y compris les interactions dans un couloir, dans une galerie d'art ou en attendant une queue.